Вернуться к оглавлению
книги 1.
Парадоксальные механизмы (ПМ).
Иллюстрированное методическое учебное пособие по разработке и конструированию «Перпетуум мобиле»
Книга 1.
Первеев Георгий Павлович
Россия, г. Ханты-Мансийск, 2006 г.
Парадоксальные механизмы - Перпетуум мобиле (ПМ).
Глава 1. Введение.
И все же… Вечный двигатель – несбыточная мечта или обыденная реальность.
Предлагаемый материал не рассчитан на читателя, который заранее точно знает, что реализовать Perpetuum mobile невозможно. Поэтому такого читателя я прошу не тратить свое драгоценное время, полюбоваться оптической иллюзией на Рис. 1 и закрыть текст.
Для всех же остальных хочется сказать несколько выстраданных мыслей:
1. Современная цивилизация существует и развивается не по лучшему сценарию. На эту тему можно много говорить, приводить массу аргументов и контраргументов. Но увы,…ни к чему это не приведет, т. к. во всех странах на ключевых позициях во всех сферах жизни, находятся люди, имеющие прагматичный, хваткий склад ума, который не позволяет им взглянуть на жизнь несколько по иному – ответственнее и романтичнее что-ли… Таков существующий миропорядок.
2. Современная наука, как продукт современной цивилизации унаследовала все ее недостатки. О них тоже можно говорить до бесконечности. Но есть одна вопиющая тенденция, которую можно выделить особо. Это претензия на истину в последней инстанции.
Среди ученых, в том числе и с мировыми именами, закрепилась пагубная страсть «закрывать» некоторые направления исследований, называть новые течения «лженауками», устраивать гонения на носителей новых знаний и т.п. Хорошей питательной средой для такого рода явлений стала почти повсеместная милитаризация, засекречивание и коммерциализация науки.
Но!... Слава Создателю - он организовал развитие Вселенной, и общества, по простым и понятным философским законам, которые позволяют критически оценивать происходящее, и не расценивать ситуацию как безнадежную.
Из них следует, что все утверждения современных «светил» науки типа - «Вечный двигатель невозможен» - не что иное, как беспомощная реакция, в общем-то, измотанных вечной внутриотраслевой конкуренцией и мощным напором нового, сереньких ученых разного уровня. Сравним ли кто из них с полетом мысли, степенью альтруистичности и патриотизма, например с Архимедом?
Нет!
Второй закон термодинамики – современный фундамент для уничижения и уничтожения всего нового, в том числе и проблемы реализации «Perpetuum mobile» – Вечного двигателя (далее в тексте – ВД). Их тяжелая артиллерия. Их воображаемый «Олимп», с высоты которого они терзают все новое. На самом деле это не Олимп. Это лишь его подножия. Настоящую вершину взяли очень и очень немногие. И за это они достойны всяческого восхищения. Большинство же брали его «в лоб», и, добившись чего-либо осязаемого, теперь думают, что они уже стоят на его вершине. Это иллюзия. Олимп покоряется только тому, кто правильно применяет этот закон.
Сам по себе он сформулирован безупречно. Здесь темы для споров нет.
Применяется же он всегда с опорой на тот уровень знаний, который существует в науке на текущий момент. В этом корень заблуждений и иллюзий.
Такой вот замкнутый круг…
Разорвать его не представляет трудности. Достаточно критически взвесив действительность, сказать себе: «То, что в термодинамике сегодняшнего дня считается изолированной (замкнутой) системой, с позиций завтрашнего дня однозначно будет «открытой системой».
Значит уже сейчас, имеет смысл искать (и всячески приветствовать такой поиск другими), те «окна» которые «открывают закрытые системы», т. е расширяют горизонты фундаментальных знаний.
Наградой будет новый уровень существования и развития цивилизации.
3. Критический анализ современного состояния официальной науки показывает, что она «буксует» абсолютно по всем направлениям. Даже достижения в информатике – это лишь совершенствование давно сформулированного, другими словами – оттачивание технологии. То немногое новое, что есть – засекречено, милитаризировано, антигуманно, экологически опасно, и имеет тенденцию на уничтожение цивилизации.
4. За прошедшие две с лишним сотни лет с момента появления запрета на ВД научно-технический уровень цивилизации, вопреки всем негативным тенденциям, существенно изменился.
Претерпел преобразования философско-логический и научный базис. Появились совершенно новые классы материалов, новые технологии. Точность изготовления деталей стала измеряться микронами.
Эти обстоятельства позволяют смело браться за проблему ВД.
Для тех, кто согласен с этими мыслями и желает заняться конструированием ВД, ниже привожу ряд наблюдений, советов, замечаний и пр., полезных для приобретения психологической устойчивости к, пока еще достаточно враждебной, действительности.
1. ВД как инженерная конструкция реален и реализуем!
В Интернете существуют десятки сайтов, в которых сообщается, что где-то там, кем-то уже реализованы какие-либо ВД, которые уже работают на благо своих создателей. Это хоть и не очень надежная, но все же поддержка моего утверждения. Все эти сведения имеют сомнительный характер и недоказуемы в том порочном информационном поле, в которое сейчас погружен мир.
2. То, что ВД до сих пор не вошел в нашу обыденность, является результатом существования гласного или негласного запрета-заговора тандема власть-науки против общества (возможны и другие, не менее подлые варианты), причем в общемировом масштабе и без объяснения первопричин.
Можно добавить, что с трудом верится, что до сих пор не был реализован или разработан теоретически хотя бы один ВД.
3. Даже сейчас, в начале 21 века, регулярно в СМИ (в том числе и в Интернете) шельмуются результаты работы исследователей этого направления естествознания.
Можно добавить о нескольких сайтах, на которых с видимым самоудовольствием и смакованием доказывается неработоспособность тех или иных конструкций ВД.
4. Даже сейчас, студентам ВУЗов вдалбливают в головы постулат о невозможности реализации ВД – поинтересуйтесь - в Интернете огромное количество студенческих рефератов, в которых как заклинание повторяется одна и та же мысль: - Вечный двигатель невозможен, вечный двигатель невозможен, вечный двигатель невозможен….!
Что знаю точно, так это то, что с такой установкой в голове – даю 120 процентов вперед, человек никогда не будет заниматься проблематикой ВД.
Существует ряд субъективных факторов, действие которых приводит к тому, что профессиональные и самодеятельные энтузиасты-исследователи ВД ходят по кругу и, в конце концов, зачастую бросают свои исследования:
5. Прежде всего – это психологический барьер. Не учитывается то, что он состоит из нескольких (точнее - множества) последовательных, и разной высоты, барьеров, с которыми исследователь ВД сталкивается в ходе работы. Преодолеть первый барьер, который гласит, что ВД не может быть реализован – это лишь первый шажок через первый бугорок, который находится в основании горного хребта называемого «Психологический барьер». Все ли готовы иметь мужество на преодоление этого бугорка? А ведь далее будет бугор непонимания и неприятия окружающими вашего интереса к ВД, еще далее – невозможность опубликования своих наработок в СМИ, еще далее трудности с возможностью обмена информацией с коллегами по «несчастью» и так далее… При этом на каждом этапе можно сломаться. Кстати, окружающие при этом только облегченно вздохнут и обрадуются: «Наконец-то ты стал таким же, как и мы, как все».
6. Нежелание анализировать, уже созданные кем-то неработающие ВД, (особенно, если их неработоспособность доказана авторитетными учеными с использованием математических приемов) с целью выявления положительных качеств конструкции.
Дело здесь в том, что природа устроена так, как ей нужно, а не так как мы этого хотим. Отсюда парадокс – мы думаем, что очередную конструкцию ВД, мы изучили настолько, что можем на пальцах и на бумаге, абсолютно аргументировано, доказать ее неработоспособность и списать со счетов. Более того, мы это сумеем втолковать самому автору этой конструкции. Но! Если эту самую конструкцию поместить в другую среду (например, из воздуха в воду – инверсия параметра), то, может оказаться, что она вдруг удивительным образом станет работоспособной! Или другой случай – бьется создатель ВД над какой-то конструктивной особенностью очередной конструкции. А ты не поленись, просмотри свой наработанный архив – там наверняка найдется что-нибудь стоящее.
7. Не использование, или неумелое использование своих, приобретенных в течение жизни, наработок, наблюдений и выводов относительно сущего мира и взаимодействий в нем.
Большинство людей живут в мире уже описанном кем-то до них, и воспринимают его по написанному. Редко кому удается, в восприятии и понимании природы, вырваться за рамки школьной программы. Игнорируются вещи, которые существуют объективно, но на которых, наука не заостряла своего внимания. И все из-за ложного посыла – раз науке это было неинтересно – значит и мне не стоит этим интересоваться.
8. Отсутствие методичности, упорства и элементарного желания для возврата к, уже, кажется полностью забракованной разработке (или просто недоконченной).
Надо помнить всегда, что конструкцию, которую ты разрабатывал 1 год или 5 лет назад, разрабатывал не ты теперешний, а ты, который был на 1 год или на 5 лет младше. Ты тогда и жил и мыслил по-другому, чем сейчас - ты был другим человеком…
9. Боязнь масштабов.
Инстинктивно разработчик (исследователь, изобретатель – кому как угодно…) стремится создать ВД привычного (Миди) масштаба, удобного для изготовления на рабочем столе или в стенах лаборатории, все остальные масштабы (Микро, Мини, Макро и т.д.), в большинстве случаев, как бы выпадают из его поля зрения.
Это непростительная ошибка – существует очень большая вероятность упустить идею. Пусть она даже пока нереализуема технически – она стоит внимания для теоретической проработки. Пройдет время – будут освоены новые технологии, появятся новые материалы, и ваша идея, казавшаяся поначалу нереализуемой, станет легко реализуемой, и даже может быть в совершенно другом, удобном для применения, масштабе.
10. Рамки определений, рамки возможностей и т.п.
Здесь можно сказать следующее - существующая классификация ВД включает в себя три принципиально отличающихся рода:
А). ВД первого рода – идеальный, принципиально невозможный в обычных масштабах, вечный двигатель, который генерирует энергию самостоятельно, без извлечения ее из окружающей среды.
Б). ВД второго рода – реально существующие конструкции - плоды науки, черпающие энергию для своей работы из интуитивно и физически понятных источников энергии. Это, например «тепловые насосы».
В). ВД третьего рода – реально существующие конструкции способные демонстрировать вечное движение при полном отсутствии трения.
Это, например сверхпроводящие агрегаты и сверхтекучие жидкости.
Но двигателями в истинном значении этого термина, они не являются. Их можно назвать, скорее всего, аккумуляторами энергии.
На первый взгляд кажется, что эта классификация исчерпывающая. Однако на самом деле это не так.
Я бы добавил еще два пункта:
Г) ВД четвертого рода – практически используемые конструкции, реальный к.п.д. которых заведомо ниже 100 процентов, но, будучи изготовленными на современном уровне, способные работать очень долго (сотни лет, при минимальном обслуживании). Например, солнечные электростанции, ветровые и гидроэлектростанции. Общими для них являются следующие признаки: постоянно возобновляемые источники энергии и сильная зависимость от временной нестабильности самих источников энергии.
Д). ВД пятого рода – комбинация первых двух. Это ВД – реально осуществимый, интуитивно и физически понятный, но черпающий энергию вроде бы из «ничего» (точнее – из чего-то, пока неизвестного или неправильно (или вообще никак!) истолковываемого современной наукой). Как можно заметить, конструкции таких ВД могут быть отнесены к ВД пятого рода лишь временно, до момента понимания и конкретизации источника преобразуемой энергии. После этого ВД автоматически можно отнести к ВД второго рода.
11. В некоторых случаях элементарное блуждание в «трех соснах», просто от слабого знания предмета интереса. Комментариев нет…
Существует еще одна очень неприятная реальность: Как ни парадоксально, но вечный двигатель с распростертыми объятиями не ждет никто из тех, кто хотя бы косвенно имеет отношение к политике, экономике, энергетике (т.е. те, от кого будут зависеть темпы внедрения ВД в жизнь, его судьба). Они будут противодействовать всеми мыслимыми и немыслимыми способами. Автор ВД и сам ВД для них – смертельные враги, угроза их благополучию и стабильности.
Есть единственный эффективный способ внедрения ВД в жизнь – максимальное предоставление информации о его (их) конструкции(ях) как можно большему количеству предприимчивых образованных людей – например через Интернет, ТВ, печать и т.п. Тогда эти люди смогут самостоятельно, используя слабости недоброжелателей, тем самым, минуя их противодействие, организовывать массовый выпуск ВД в разных уголках планеты. Остановить потом этот лавинообразный процесс будет невозможно.
У этого способа есть недостаток – при современном уровне международной и государственной юриспруденции, ориентированной на обслуживание элиты, автор ВД не сможет заработать ни копейки на своей конструкции. Другими словами автору нужно быть готовым подарить свою конструкцию всем людям вне зависимости от гражданства, безвозмездно.
Глава 2. Вечный двигатель без флера.
Вечный двигатель – а как же законы физики?
Существующие (открытые) законы физики – фундамент для обоснования, разработки и конструирования ВД. Это неоспоримая истина. Ее и будем придерживаться.
Второй закон термодинамики в общепринятом на данный момент значении необходимо временно игнорировать, т.к. речь идет как раз о возможности его применения к ВД в результате получения новых знаний при исследовании этих самых ВД.
По всеобщему мнению настоящий ВД – это некая тайна, в которую могут быть посвящены лишь избранные. Это глубочайшее заблуждение.
ВД – это обычное техническое устройство, способное преобразовывать некий доступный энергетический потенциал (неважно динамический или статический) в динамическую или статическую энергию, удобную для применения.
Другими словами ВД в общем виде - это некий аналог вертушки (турбины) в водяном потоке. Только в качестве водяного потока должен выступать поток какой-то другой (возможно пока неизвестной), стабильной во времени, существующей там, где нужно, энергии.
Наиболее удобными кандидатами на поставщиков даровой энергии являются поля – магнитное, электрическое и гравитационное:
1. Магнитное поле планеты. Присутствует в околоземном пространстве повсеместно. Стабильно во времени, но слабое в приемлемых масштабах.
2. Сильные магнитные поля электромагнитов и постоянных магнитов. Мобильны и компактны, но имеют большой градиент.
3. Мощные нестабильные природные электрические поля. Присутствуют эпизодически повсеместно на Земле и в околоземном пространстве.
4. Сильные электрические поля, получаемые при посредстве соответствующих технических устройств. Мобильны и компактны. Гибки.
5. Стабильное мощное природное гравитационное поле планеты. Присутствует повсеместно на Земле и в околоземном пространстве. В приемлемых масштабах имеет слабый градиент
Сравнительный анализ показывает, что поля указанные в п.п.1 и 3, в силу своей слабости или нестабильности мало подходят в качестве удобных источников энергии.
Из оставшихся трех наиболее привлекательным является гравитационное поле (п. 5).
Искусственные электрические и магнитные поля (п.п. 2 и 4) многообещающи с точки зрения получения минимальных массогабаритных параметров ВД.
Существует еще одна группа потенциальных источников энергии: Вакуум, сверхпроводимость, кавитационные и электровакуумные эффекты, границы фазовых состояний, плазма и т.п.
Теоретизировать о них в данной книге не имеет смысла.
Особо следует отметить слабое магнитное поле планеты (п.1). Его отличительной особенностью является равномерность и параллельность расположения силовых линий. Это очень важные характеристики, т.к. они, образно говоря на первых порах, позволяют через магнитное поле «зацепиться» за гравитацию и доказать воочию, потенциальную возможность построения, по крайней мере, гравитационных ВД.
В идеале, ВД должен быть мощным, малогабаритным, износостойким, технологичным, безопасным, простым в обслуживании, понятным по устройству, и т.д.
Свести все эти требования воедино достаточно трудно. Однако практика показывает - трудно…но возможно! Была бы изначальная конструкция. Достижение же наилучшего результата – это вопрос лишь времени!
Все описанные ниже конструкции технологически просты и могут быть реализованы даже в условиях обычной мастерской.
Глава 3. Первый настоящий Вечный двигатель.
Вечный двигатель – это просто! На бумаге…
На интернетовских страницах посвященных ВД есть материалы, содержащие некоторые, пусть и не очень конкретные, подсказки, дающие пищу для ума. Так на одном из сайтов я встретил утверждение, что в принципе ничто не мешает построить ВД с использованием закона Архимеда и закона сообщающихся сосудов, а так же с использованием эффектов фазового перехода жидкости в пар и обратно.
Подтверждением возможностей последней группы эффектов, является, имеющаяся в продаже игрушка «пьющая птица» (Рис. 2), хорошо иллюстрирующая принцип действия и колоссальную эффективность теплового насоса при мизерном перепаде температур в элементах конструкции. Уже полтора года, стоя у меня на столе, она неутомимо наклоняется, что бы выпить очередную свою порцию воды. Гениальная игрушка! Но, увы… Это ВД четвертого рода.

Первую теоретически работоспособную конструкцию ВД «Магнитно-флюгерный двигатель» я придумал в 1991 году (далее МФГД или ПМ 131291).
ПМ 131291 – это чисто демонстрационная модель (кстати, находящаяся в полном соответствии с законами природы «утвержденными» официальной наукой). Его изготовление в домашних условиях достаточно трудоемко. И как говорится - овчинка выделки не стоит.
Но! У него есть достоинство. Он показателен как иллюстрация для пояснения принципа действия простейшего ВД – на взаимно независимых перпендикулярных полях разной природы – и соответственно, для подтверждения тезиса о том, что ВД не только возможен, но и обычен. В свое время решение такой задачи для меня было психологическим трамплином для осмысленного поиска других, более эффективных и привлекательных ВД.
Для того, что бы наглядно и просто показать принцип его действия, я предлагаю ознакомиться с описанием устройства «Флюгерно-гравитационного двигателя» - далее ФГД.
Сам по себе ФГД с практической точки зрения ничего ценного не представляет, но как иллюстрация устройства и принципа действия МФГД ПМ 131291 наиболее подходящ именно он.
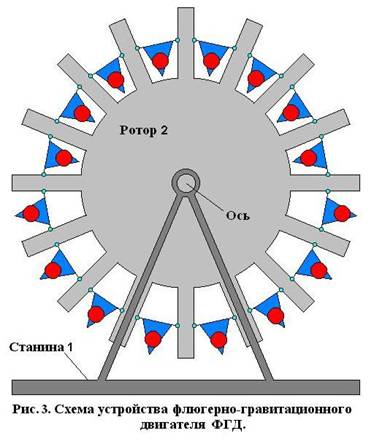
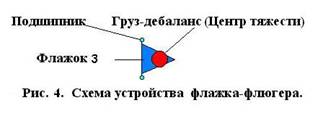
ФГД состоит из станины 1, ротора 2 и флюгеров-дебалансов 3 (см. рис.3). Ротор может свободно вращаться относительно своей оси. Флюгеры 3 (см. рис 4) так же могут свободно вращаться относительно своих осей. Последние закреплены на периферии ротора симметрично, вдоль касательных и образующей ротора, через равные промежутки. Количество флюгеров должно быть достаточно большим (на рис. 3 изображен ФГД с 16 флюгерами). Вообще – чем больше флюгеров, тем лучше. Все флюгеры одинаковы и имеют форму удлиненного флажка. Такая форма обеспечивает дебалансность флюгеров. Красными точками на рисунке отмечены центры тяжести каждого флюгера.
Если ФГД не обдувается воздухом, то он находится в исходном равновесном положении.
Если ФГД обдувать сверху, снизу, спереди или сзади, то ничего интересного не произойдет. Флюгеры-флажки установятся «по ветру», однако ротор не повернется ни на градус, т.к. крутящие моменты от центров тяжести флюгеров слева и справа от вертикали через ось ротора будут уравновешивать друг друга.
Иное дело, если обдувать ФГД сбоку – слева или справа, как это показано на рис. 5.
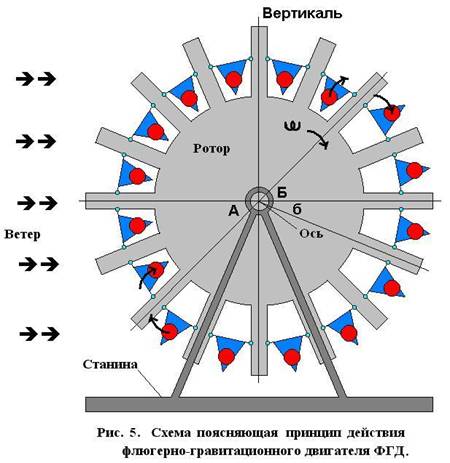
При определенной скорости воздушного потока, его давление повернет флюгеры находящиеся в секторах А и Б в положение показанное на рисунке (физически – ветровая ориентирующая составляющая превысит гравитационную и указанные флюгеры повернутся «по ветру»). При этом центры тяжести повернувшихся флюгеров слева от оси ротора приблизятся к ней, тем самым уменьшатся плечи действия веса этих флюгеров, а центры тяжести повернувшихся флюгеров справа от оси – удалятся от нее, соответственно увеличатся плечи действия их веса. Баланс суммарных крутящих моментов слева и справа от вертикали через ось ротора, нарушится, и ротор повернется по часовой стрелке на некоторый угол «а». Если этот угол будет чуть-чуть больше угла «б», то процесс переориентирования флюгеров попадающих в секторы А и Б будет непрерывным и соответственно ротор ФГД будет вращаться. Здесь «б» - величина сектора приходящегося на один флюгер. В данном ФГД количество флюгеров Н равно 16, соответственно
«б» = 360/Н, т.е. «б» = 22,5 градусов.
Действующая угловая величина секторов А и Б определяется весом и конфигурацией флюгеров, а так же действующей скоростью ветра (напором).
Для данного ФГД минимально возможная ширина этих секторов равняется 22,5 градусов, максимально возможная – 90 градусов.
Следует обратить внимание на то, что ФГД становится работоспособным начиная лишь с некоторой скорости обдува, имеет низкий к.п.д., но (!) стабильные характеристики в широком диапазоне скоростей обдува.
И работает он не за счет прямого давления ветра, как обычные ветряки, а за счет гравитации вынужденной отдавать свою энергию ротору из-за ориентирующего (флюгерного) действия ветра на флажки-дебалансы.
Теперь, когда ясен принцип действия ФГД, по аналогии с ним сконструируем наш ВД «Магнитно-флюгерный гравитационный двигатель» ПМ 131291 (см. рис. 6).
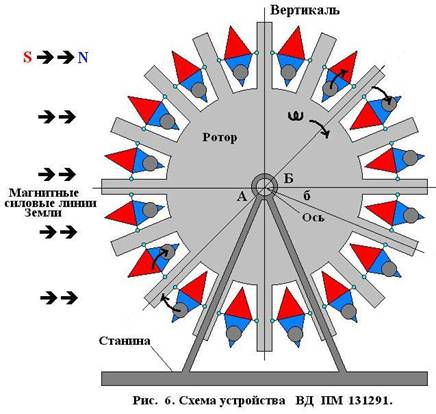
Взамен ветра используем ориентирующее действие магнитного поля Земли (или искусственного – достаточно мощного и равномерного) на магнитную стрелку. Соответственно вместо флюгеров используем магнитные стрелки-дебалансы (см. рис 7).

При установке ПМ 131291 плоскостью ротора вдоль силовых линий магнитного поля Земли, оно будет стремиться ориентировать магнитные стрелки-дебалансы в направлении магнитного меридиана (не притягивать, а именно ориентировать!). Это ему будет удаваться лишь в секторах А и Б. При достаточно большом количестве стрелок процесс переориентирования их будет непрерывным, и соответственно ротор будет вращаться, т.е. ВД будет работать!
Ясно, что особой практической пользы из такого ВД не извлечь. Но то, что он иллюстрирует тезис о возможности создания ВД, в том числе и очень мощного – нет сомнения.
Теперь несколько слов о конструктивных особенностях этого ВД:
Диаметр ротора двигателя и количество магнитных стрелок-дебалансов нужно подбирать опытным путем, по следующим правилам:
1. Диаметр ротора должен быть таким, что бы по его периферии можно было свободно разместить достаточно большое количество (не менее нескольких десятков – желательно четное количество) магнитных стрелок одинакового веса, конфигурации и намагниченности.
2. Количество стрелок должно быть таким, что бы они, будучи размещенными по периферии ротора, своими магнитными полями оказывали исчезающе малое влияние друг на друга.
3. Вес и намагниченность каждой стрелки должны быть в таком соотношении, что бы стрелка-дебаланс, под действием магнитного поля Земли, ориентировалась бы в направлении магнитного меридиана даже при противодействующем наклоне оси вращения на не менее чем 360/Н градусов от вертикали в плоскости магнитного меридиана. Здесь Н – количество стрелок-дебалансов.
Вообще, конструкция ПМ 131291 достаточно гибка. Так ввиду того, что достаточно трудно свести воедино требования п.п. 1, 2, 3, можно вместо одного ротора применить несколько одинаковых, насаженных на одну ось, при этом на каждом роторе уже нужно будет иметь всего Н/М стрелок дебалансов (М – количество роторов). Фазы роторов должны быть сдвинуты относительно друг друга на угол «б».
Что касается дебалансности магнитных стрелок, то ее можно обеспечить разными способами: например пригрузив одну половинку стрелки или сдвинув ось вращения стрелки относительно ее геометрического центра в сторону одного полюса.
И, наконец, самое главное – все несущие элементы конструкции ПМ 131291 должны быть изготовлены из немагнитных и желательно легких материалов.
В ПМ 131291 величина секторов А и Б определяется как и в ФГД несколькими величинами, а именно: весом и степенью дебалансности магнитных стрелок, величиной их намагниченности и величиной внешнего магнитного поля (Земли).
Исходя из жизненного опыта, могу сказать, что реальная величина секторов А и Б может находиться где-то в районе нескольких градусов. Для абстрактного примера возьмем 4 градуса. Тогда, при условии, что в секторах А и Б должны находиться как минимум по две стрелки (условие надежности работы ВД) общее количество стрелок – Н должно быть 180. Если параллельных роторов шесть, то на каждом из них должно быть по 30 стрелок (через 12 градусов). Значит, в принципе можно уложиться в диаметр роторов менее 1 метра. Соответственно при нормальной намагниченности (на уровне стрелки компаса) вес каждой стрелки может быть в районе 1 грамма. При этом дебалансности стрелок будет хватать на создание разности крутящих моментов слева и справа от вертикали через ось роторов, в пределах нескольких десятых долей грамма на сантиметр под действием магнитного поля Земли.
А этой величины будет достаточно для преодоления сопротивления вращению (трение в подшипниках, неточность изготовления деталей и др.) ротора.
Глава 4. ВД «Колесо дьявола» (ПМ 010204).
Вторая конструкция ВД (ПМ 010204) разрабатывалась мной как демонстрационный, достаточно мощный привод для оживления, например рекламных механических панелей.
1. Идеи положенные в основу конструкции ВД:
1. При перемещении погруженного тела по горизонтали в реальности требуется расходовать энергию лишь на преодоление сопротивления трению о жидкость и ее вязкости. В идеале на такое движение может потребоваться исчезающе малое количество энергии. Все зависит от требуемой динамики процесса.
2. В однородной несжимаемой жидкости все точки (отдельно взятые объемы) ее нахождения равноценны в геометрическом плане и отличаются только испытываемым гидростатическим давлением, которое диктуется местонахождением точки (отдельно взятого объема). Другими словами – если взять какой либо объем жидкости вблизи поверхности и переместить его в позицию вблизи дна, то никаких геометрических изменений общего объема и свойств жидкости не произойдет, т. к. в этом случае будет реализован принцип «движения по контуру», в идеале не требующий энергетических затрат, в реальности - требующий незначительных затрат энергии.
3. На всякое погруженное в жидкость тело действует выталкивающая сила численно равная весу вытесненной им жидкости (закон Архимеда).
Далее будут рассмотрены некоторые возможные варианты конструктивного исполнения ВД:
2. Описание конструкции ПМ 010204:
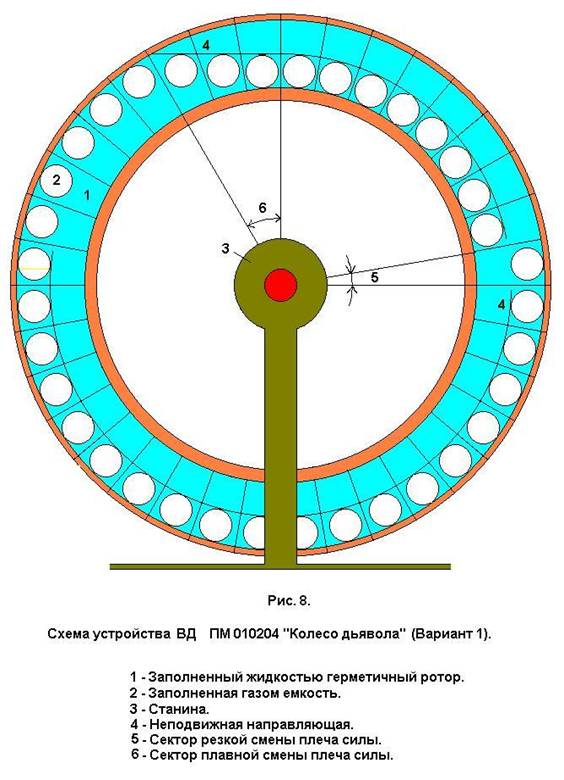
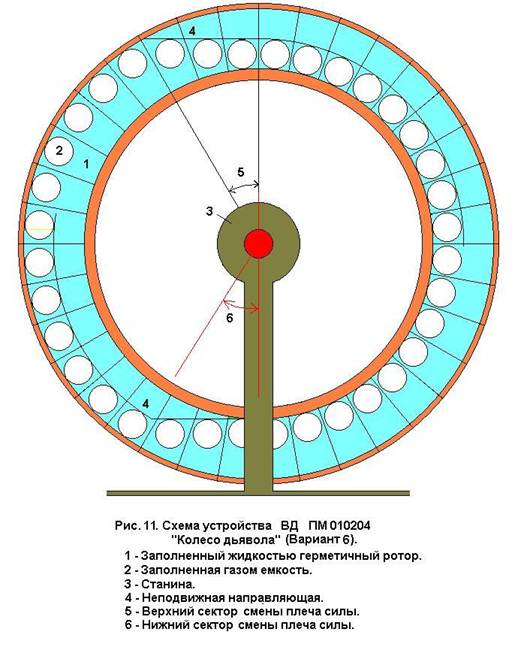
ВД ПМ 010204 (далее в тексте – ВД) показанный на рисунке 8 состоит из станины 3, на которой посредством оси с подшипниками установлен свободно вращающийся ротор 1. Ротор 1 состоит из нескольких деталей: Часть из них подвижна, часть неподвижна. К подвижным относятся, разбитое на секторы рабочее колесо, пустотелые рабочие емкости 2, корпус и ось. К неподвижным (относительно горизонта) – система направляющих 4.
Конструкция ВД некритична к вариантам реализации отдельных деталей и элементов. Главными критериями для конкретного воплощения являются удобство и практичность эксплуатации ВД. При этом легко можно сохранить все положительные свойства и характеристики ВД.
1. ВД ПМ 010204, вариант 1 - базовый (см. рис. 8).
3. Описание особенностей конструкции:
Ротор.
Ротор представляет собой диск, разбитый по периферии перегородками на секторы. Каждый сектор являет собой рабочее пространство потенциально готовое для взаимоперемещения прочной полой емкости (с газом, или без него, т. е. с вакуумом) цилиндрической или шарообразной формы (в принципе форма может быть любой – удобной для конкретной конструкции) и соответствующего объема жидкости, например, воды (Вообще это может быть любая пригодная, желательно с меньшей вязкостью, жидкость, лишь бы она была достаточно тяжелой, вплоть до ртути или расплава, какого либо металла. Чем больше плотность жидкости, тем больше будет достигнут эффект от ВД при одинаковых габаритных показателях). Диск ротора находится внутри цилиндрического корпуса и механически соединен с ним. Конфигурация сечения диска ротора выбрана такой, чтобы обеспечить свободное пространство вблизи оси вращения, для расположения в нем системы неподвижных направляющих. Здесь имеется в виду неподвижность направляющих относительно горизонта. Т.к. весь ротор заполнен жидкостью, возникает необходимость обеспечения хорошего уплотнения между силовой осью, с которой снимается механический момент и неподвижной центральной осью, на которую опирается система направляющих. Задачи такого рода, хотя и решены давно, для кустарного производства затруднительны. Поэтому, в качестве временного, принято следующее решение:
Силовая ось пропущена через весь ротор и жестко соединена с ним. Этим обеспечивается полная герметичность ротора. Внутри ротора на этой оси, как маятник расположена система направляющих, относительную неподвижность которых обеспечивает массивный груз, укрепленный в нижней точке системы. Таким образом, обеспечивается достаточно стабильное положение направляющих относительно горизонта при любом угле поворота ротора. Система направляющих состоит из двух частей (они могут быть выполнены в виде единой детали) – верхней и нижней. Верхняя направляющая обеспечивает необходимую траекторию движения полых емкостей в верхней области геометрии ротора. Нижняя – соответственно – в нижней. Их конфигурация хорошо видна на рисунке № 8. Ротор своей осью через подшипники опирается на станину. Вращение оси, какой либо удобной системой трансмиссии передается потребителю.
Скомпонованная таким образом конструкция и являет собой «Гравитационный гидромеханический источник крутящего момента» - т.е. ПМ-010204 («Колесо дьявола»).
4. Описание работы ВД.
Поскольку ротор представляет собой герметичную полую емкость, заполненную жидкостью, он ведет себя как единый сосуд, независимо от своего углового положения. Соответственно все полые емкости, распределенные в секторах ротора и представляющие собой объекты с положительной плавучестью, стремятся всплыть внутри этого сосуда. Однако перегородки между секторами и система направляющих не дают им сделать это. Соответственно все они располагаются в секторах по периферии диска ротора в энергетически выгоднейших позициях, т.е. в самых верхних точках пространства своего нахождения ограниченного с одной стороны перегородками, с другой - направляющими. Говоря иначе – в тех местах секторов диска ротора, которые в данном угловом положении ротора находятся выше. Т.к. левая и правая части ротора содержат равное количество полых емкостей, которые стремятся всплыть и тем самым давят на перегородки ротора, суммарное их воздействие на ротор равно нулю. При этом то обстоятельство, что они расположены несимметрично относительно вертикали, не имеет значения. Те емкости, которые слева вверху ротора упираются снизу в верхнюю направляющую, не оказывают давления снизу по касательной на перегородки ротора. А емкость, находящаяся в правом крайнем секторе на большем радиусе, совместно с емкостями на меньшем радиусе, своей подъемной силой компенсирует встречный крутящий момент от находящихся на большем радиусе емкостей в левой части ротора. При этом рассмотрении присутствие нижней части ротора можно вообще игнорировать, т.к. она симметрична относительно вертикали.
Таким образом, прямого влияния на угловое положение ротора полые емкости не оказывают! Но и практически не противятся принудительному (от другой силы) вращению ротора.
Точнее: Противятся, но сила их сопротивления заведомо ниже силы дебаланса жидкости – см. книгу 2.
При этом они решают важнейшую задачу - своим присутствием полые емкости вызывают не требующие энергетических затрат («движение по контурам») перемещения центров приложения веса (сил тяжести) объемов жидкости находящихся в соответствующих противоположных секторах. Указанная на рисунке 8 конфигурация вызывает такое смещение центров приложения веса жидкости в секторах, что суммарно они создают пусть и не очень большой, но ощутимый крутящий момент, заставляющий ротор поворачиваться по часовой стрелке. Это подтверждают расчеты, проведенные на базе эквивалентной схемы.
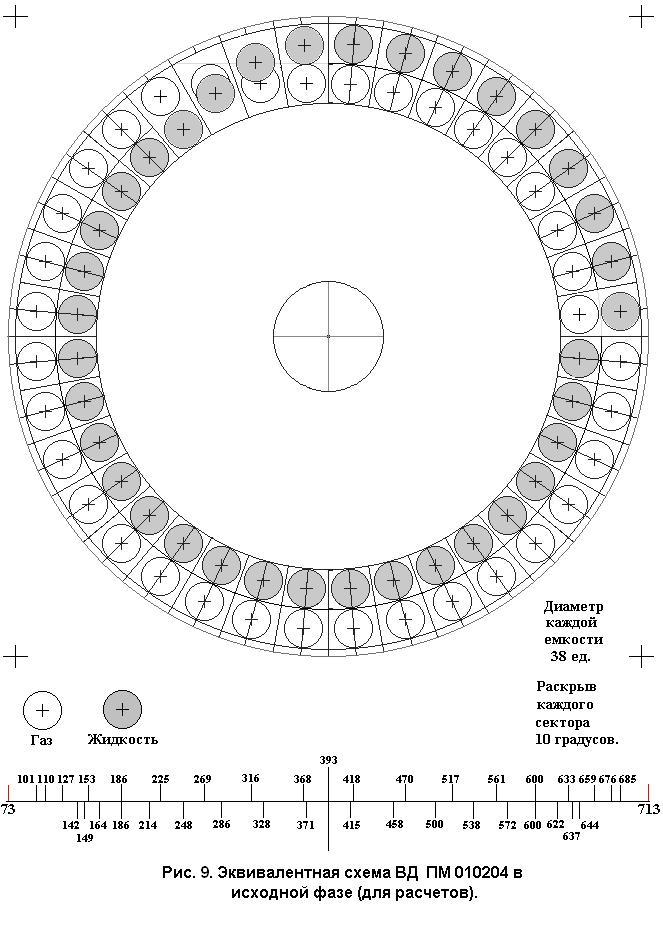
5. Описание эквивалентной схемы:
Для упрощения расчетов применена эквивалентная схема, в которой объемы жидкости в секторах заменены виртуальными, заполненными жидкостью, емкостями, наделенными всеми свойствами жидкости как при рассмотрении ее поведения в рамках конкретного сектора, так и в рамках всей полости ротора, как единого сосуда.
Допущения и упрощения:
1. Вес каждой пустотелой емкости приравнен нулю.
2. Вес каждого виртуального объема жидкости принят за 1 условную единицу.
3. Вес жидкости находящейся внутри ротора в пространстве между пустотелыми емкостями и виртуальными объемами жидкости игнорируется.
4. Выталкивающая сила, действующая на каждую пустотелую емкость принята за 1 условную единицу.
5. За одну графическую единицу длины принят 1 пиксель монитора.
6. Силы трения в подшипниках, силы трения в жидкости, ее вязкость и пр. слабые эффекты игнорируются.
7. Точками приложения сил тяжести и выталкивания считаются геометрические центры соответствующих объектов.
На рис. 9, внизу на линейке проставлены координаты центров пустотелых емкостей и центров виртуальных объемов жидкости в пикселях.
Расчет производился для раскрыва одного сектора, т.е. для величины поворота ротора 10 градусов через 2,5 градуса (4 фазы – (1- 5), 6, 7, 8, 9=1) из соображения, что через каждые 10 градусов поворота картина полностью повторяется. Фаза 1-5 условно считается единой, т.к. существует в рамках сектора < 2,5 градусов. Это фаза перехода крайней полой емкости с малого радиуса на большой.
Критерий работоспособности ВД здесь – ненулевой крутящий момент на валу ротора в любом его угловом положении. Критерий очень жесткий, т.к. в принципе такой и другие (!) ВД могут оказаться вполне работоспособными и в присутствии отрицательного крутящего момента. Все зависит от энергетического баланса.
Методика расчета:
Сначала для каждой из 8 фаз положения ротора был проведен расчет баланса суммарных сил действующих на ротор со стороны пустотелых емкостей.
Затем для каждой из 8 фаз положения ротора был проведен расчет баланса суммарных сил действующих на ротор со стороны виртуальных объемов жидкостей.
После этого для каждой фазы проведено суммирование сил с учетом знака.
Эквивалентная схема приведена на рис. 9.
6. Описание расчетов:
Расчеты проводились три раза. Два раза вручную, один – с использованием возможностей программы «Майкрософт Эксель». Первый расчет был чисто прикидочным, для проверки предположения о том, что в принятой к рассмотрению геометрической конфигурации системы существует некая незаметная с первого взгляда «область логической неоднозначности» («зона дьявола») которая обеспечит возможность создания нескомпенсированной асимметрии крутящего момента в поле гравитации.
Результат расчета показал, что да, действительно «зона дьявола» существует. И рассматриваемый ВД должен работать. Т.е. выдавать «на гора» даровую энергию.
Второй расчет делался уже основательно, с использованием в качестве базовых, чертежей отображающих ВД в разных фазах положения ротора. Результаты расчета подтвердили правильность первого расчета.
Третий расчет делался чисто математически, в программе «Майкрософт Эксель», в качестве базовых использовались чертежи с вычисленными геометрическими параметрами.
Расхождение с результатами ручных расчетов ничтожное.
Таким образом, проведенные вычисления показали, что ВД ПМ 010204 представляет собой работоспособную конструкцию. Графическое представление расчета баланса крутящих моментов для ПМ 010204 (базовый вариант), приведено на рис. 10.
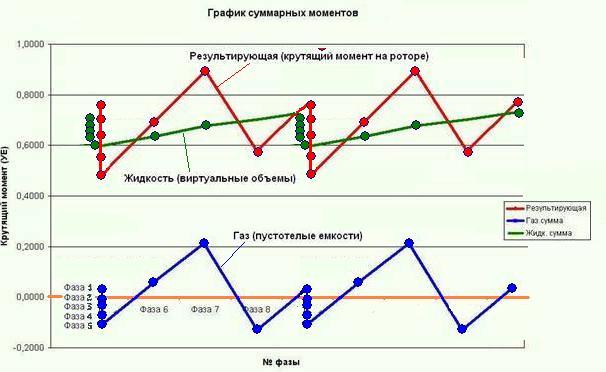
Рис. 10. Сводный график суммарных моментов вращения действующих на ротор со стороны газа и жидкости, а так же результирующей этих моментов действующей на ротор ПМ 010204 (Крутящий момент на валу). Фазы (1-5)….9 – поворот ротора на 1/36 от 360 градусов, т.е. на 10 градусов (между фазами 2,5 градусов). При всех последующих поворотах на 10 градусов картина повторяется.
2. ВД ПМ 010204, вариант 6 - оптимум (см. рис. 11). По сравнению с базовым имеет крутящий момент на валу вдвое больший.
Глава 5. ВД «Многофазный гидростатический мотор» (ПМ 160804).
Третья конструкция ВД (ПМ 160804) разрабатывалась мною как, не имеющий ограничений по мощности, привод для использования в народном хозяйстве.
- Анализ существующих конструкций ВД (работающих и неработоспособных) показал, что в подавляющем большинстве случаев все они базируются на одном принципе – принципе «фазового (углового) смещения», будь то гравитационное, электрическое, магнитное, или еще какое-либо.
- Главная задача стоящая при разработке гравитационных (работающих от силы тяготения) ВД – сконструировать некое устройство, которое бы с помощью каких то энергетически малозатратных (или вообще беззатратных) перемещений, вызывало эффект механического дисбаланса, другими словами эффект «смещения». Причем это устройство должно быть, в широком смысле слова, инвариантным для самой гравитации. В идеале оно не должно зависеть от гравитационного поля (быть «ортогональным»). Например, как было изложено в главе III, можно сконструировать устройство смещения с использованием магнитного поля Земли (дебалансная магнитная стрелка). Однако ВД сконструированный на его основе будет настолько маломощным, что будет годен разве лишь что, для демонстрационных целей. Для практики же нужен ВД уровня мощности, привлекательного для энергетики.
- Собственная практика конструирования показала, что в чистом виде механическое, магнитное, гидравлическое или еще какое-либо устройство смещения, реализовать либо очень затруднительно, либо вообще невозможно.
- Анализ комплексов некоторых математических функций, их совместное поведение в приложении к некоторым механическим системам, показал, что существуют особые «зоны» (!) т.н. «Зоны дьявола» (термин автора), где использование свойств функций, свойств и геометрии элементов систем в равнораспределенных векторных силовых полях, могут дать очень и очень неожиданные результаты.
- Существование «Зон дьявола», в свою очередь дало возможность, опираясь на их свойства, конструировать мощные устройства смещения – «Модуляторы» (термин автора).
- При анализе гидростатических дебалансных устройств неожиданно проявился один своеобразный их класс – «Дебалансы с виртуальным грузом» ДВГ - (термин автора), отличительной особенностью которых является относительно слабая зависимость величины и направления дебалансности от направления вектора действия, силы создающей эту дебалансность.
Описание конструкции гидростатического дебаланса с виртуальным грузом – гидростатического модулятора – далее ГСМ.
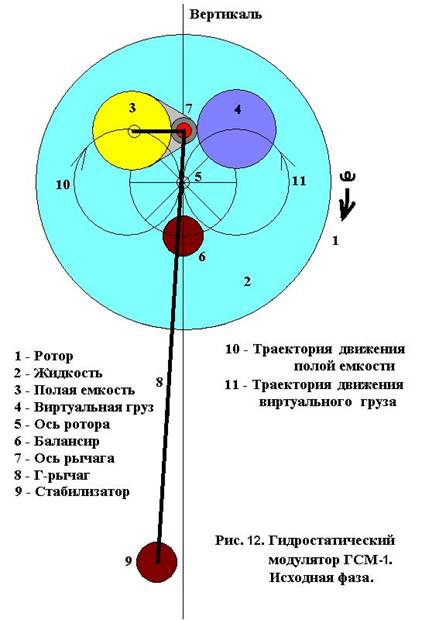
ГСМ (см. рис. 12) представляет собой, находящийся на оси (со свободой вращению), герметичный корпус-ротор заполненный какой либо жидкостью (чем плотнее – тем лучше, идеальный вариант – ртуть). Внутри корпуса, на некотором удалении от оси вращения установлена другая ось, на которой находится Г- образный рычаг, со свободой вращению вокруг нее, в месте соединения длинного и короткого плеч рычага. К концу короткого плеча рычага прикреплена пустотелая прочная емкость заполненная газом или вакуумом. К длинному – массивный груз (стабилизатор, веса которого достаточно для удержания рычага в положении близком к вертикальному (точнее – когда длинное плечо рычага почти параллельно вертикали)). На противоположной к оси вращения рычага, стороне корпуса, закреплен неподвижно уравновешивающий балансир. Его вес и точка расположения таковы, что при отсутствии жидкости внутри ротора вся конструкция находится в безразличном равновесии.
При наличии жидкости внутри ротора, на элементы его конструкции начинают действовать силы, нарушающие его первичный баланс.
Так, пустотелая емкость, стремясь всплыть внутри ротора, отклонит длинное плечо рычага в сторону своего всплывания. Появится плечо силы для веса стабилизирующего груза. Физически это вызовет появление дебалансной составляющей стремящейся повернуть ротор так, что бы он занял положение, когда ось вращения рычага окажется в наиболее низкой точке. Это паразитная сила. Ее вызывает механическое взаимодействие элементов конструкции в гравитационном поле. В данной ситуации она стремится повернуть ротор против часовой стрелки.
Однако существует еще одна вращающая сила – встречно направленная. Это сила дебаланса жидкости внутри ротора. Ее создает зеркальный объем жидкости находящийся в позиции точно противоположной мгновенному местонахождению пустотелой емкости. Этот объем называется «виртуальным грузом» т.к. угловое его положение и удаление от оси вращения ротора (без каких либо механических элементов – чистая гидростатика), имеют только мгновенные величины, зависящие от углового положения ротора.
При определенных размерах короткого плеча рычага и удаления его оси вращения от оси вращения ротора (первый оптимум) соблюдаются следующие условия: Пустотелая емкость всегда находится левее или точно (в единственной точке) на линии вертикали проходящей через ось вращения ротора.
Виртуальный же груз (зеркальная производная пустотелой емкости) всегда находится правее или точно (в единственной точке) на линии вертикали проходящей через ось вращения ротора.
Поскольку пустотелая емкость находится внутри ротора, а ротор при отсутствии жидкости был уравновешен, то и в присутствии жидкости, стремление емкости всплыть само по себе никоим образом не сказывается на угловом положении ротора, т.к. это является чисто внутрисистемным взаимодействием элементов конструкции. Однако, через механические связи проекцией этого внутрисистемного взаимодействия на ротор, все же, будет наличие описанного выше паразитного крутящего момента.
Иное дело для виртуального груза. Тот объем ротора, который слева от оси вращения ротора вытеснила пустотелая емкость, заполнен соответствующим объемом жидкости (в соответствующей – зеркальной позиции) в правой половине ротора. Как следствие - правая половина ротора будет тяжелее левой. Поскольку ротор является балансным объектом, на котором проявляется действие внешнего поля, в данном случае гравитационного, то он начнет под действием тяжести правой своей половины, поворачиваться по часовой стрелке до тех пор, пока позиционно виртуальный груз и пустотелая емкость не окажутся в верхних точках своих траекторий движения. Это верхние, так называемые точки равновесия пустотелой емкости и виртуального груза.
Дальнейший активный поворот ротора невозможен. Зато он не будет оказывать никакого сопротивления внешнему поворачивающему воздействию, т.к. в оставшемся возможном секторе поворота до нижних равновесных точек, ротор будет уравновешенным объектом. Нетрудно заметить, что между верхними и нижними точками траекторий движения пустотелой емкости и виртуального груза ровно по 180 градусов.
Таким образом, конструкция ГСМ обладает тремя замечательными свойствами:
1. В активном секторе поворота (от 180 до 360 градусов сектора движения пустотелой емкости) ротор создает мощный крутящий момент.
2. В пассивном секторе поворота (от 0 до 180 градусов сектора движения пустотелой емкости) ротор ведет себя как уравновешенный объект, практически не оказывая сопротивления внешнему поворачивающему воздействию.
3. Нижние равновесные точки – точки неустойчивого однонаправленного равновесия. Оказавшись в этом положении, ротор самопроизвольно переходит в фазу вращения в активном секторе.
Примечания:
1. Направление движения пустотелой емкости по своей траектории внутри ротора совпадает с направлением вращения самого ротора. Направление мнимого движения виртуального груза зеркально относительно вертикали по отношению к движению пустотелой емкости, т.е. встречно направлению вращения ротора.
2. Вращаясь, ротор ГСМ выдает крутящий момент, меняющийся по закону прореженной через пик эпициклоиды (1 пик на 1 оборот).
Точнее: Расчет показывает, что крутящий момент изменяется по синусоиде смещенной по вертикали относительно временной оси.
На рис. 13 показан облегченный вариант ГСМ. В нем в качестве стабилизатора используется система шток/шатун (8)-подшипник скольжения (9). Такая конструкция обладает гораздо лучшими массогабаритными параметрами.
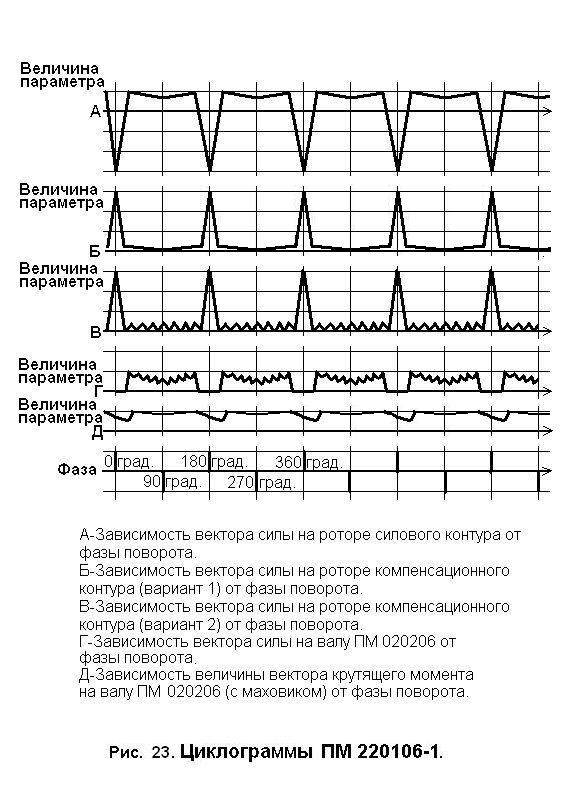
На рисунке 14 показаны циклограммы для разных конструкций ПМ 160804:
Примечание: При анализе учитывайте, что вместо эпициклоид на циклограммах присутствуют синусоиды.
1. А – Циклограмма крутящего момента одиночного ГСМ.
Видно, что в секторе 180-360 градусов ГСМ создает крутящий момент.
В секторе 0-180 градусов ведет себя пассивно.
2. Б – Совмещенные циклограммы двухфазного ПМ 160804.
В секторе 0-180 градусов крутящий момент создает ГСМ2, в секторе
180-360 градусов ГСМ1. Четко выраженный импульсный характер суммарного крутящего момента.
3. В – Совмещенные циклограммы четырехфазного ПМ 160804.
В обоих секторах в любой момент 2 ГСМ создают постоянно присутствующий крутящий момент. Слабо выраженный импульсный характер суммарного крутящего момента.
4. Г – Совмещенные циклограммы восьмифазного ПМ 160804.
В обоих секторах в любой момент 4 ГСМ создают постоянно присутствующий крутящий момент. Очень слабо выражена импульсная составляющая.
Понятно, что с увеличением количества ГСМ улучшаются характеристики ПМ 160804.
В принципе ГСМ может быть любое количество. Даже 1 – при условии использования массивного ГСМ или дополнительного маховика. Но лучше если их количество будет кратным 4.
Сами ГСМ могут быть размещены на станине любой конфигурации (круглой, прямоугольной, треугольной и пр.). Главное, что бы они были связаны между собой с необходимым сдвигом фаз, какой либо удобной трансмиссией, в единую силовую установку.
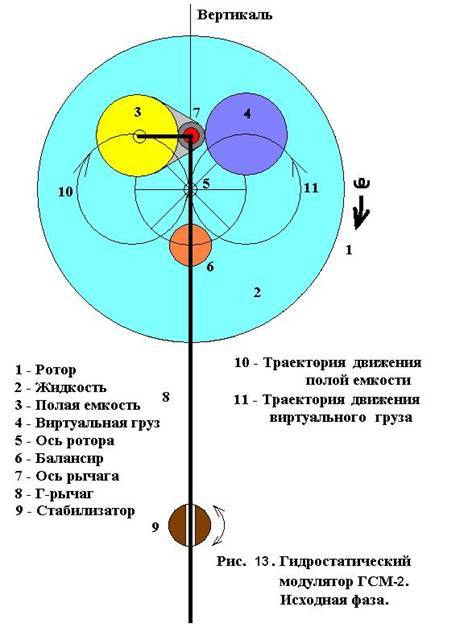
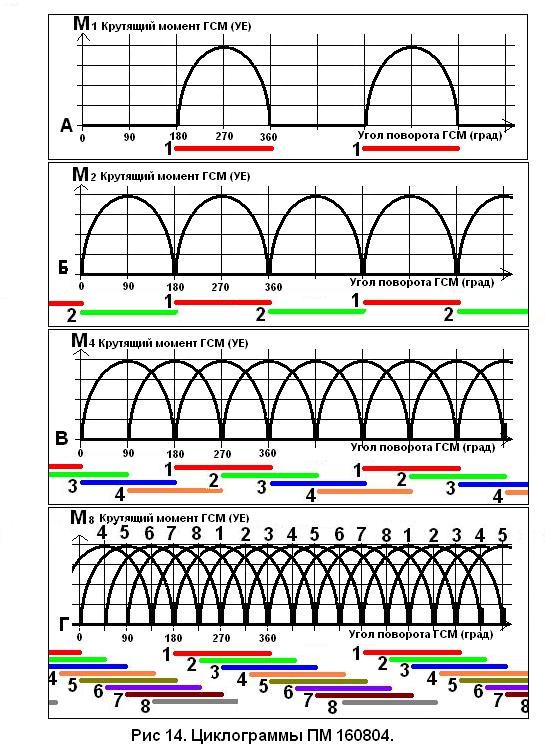
Рис. 14. Циклограммы ГСМ и ПМ 160804.
Установив несколько ГСМ (минимум – 1, максимум – без ограничений) на единой станине и связав их механическими передачами, с соответствующим сдвигом фаз (360/Н градусов)
получим Н-фазный ВД ПМ 160804 (Н – количество ГСМ).
В качестве примера на рис. 15 показан восьмифазный ВД ПМ 160804.
Такой ВД, конечно еще не идеал – стационарен, массивен, габаритен…но… имеет целый ряд существенных достоинств:
1. В зависимости от размеров конструкции способен вырабатывать уровень мощности необходимый для любого практического применения.
2. Имеет простую конструкцию, делающую возможным изготовление ВД даже в условиях домашней мастерской.
3. Для изготовления ВД не требуется каких либо дефицитных материалов или экзотических технологий.
4. ВД экологически чист.
5. ВД перспективен для дальнейших усовершенствований и модификаций с целью достижения массогабаритных параметров, удовлетворяющих требованиям к двигателям подвижных транспортных платформ, вплоть до автомобилей.
6. ВД работоспособен в любой точке поверхности и прилегающего ближнего пространства земного шара.
7. ВД вырабатывает побочный продукт – тепло.
В многофазном ПМ 160804 в зависимости от фазовых соотношений (чисто конструкционный параметр – произвол разработчика) между отдельными ГСМ, сектор активной работы ГСМ(ов) может перемещаться по часовой стрелке, против часовой стрелки или по определенному алгоритму. При этом направление вектора крутящего момента остается без изменения.

Ниже привожу часть схем семейства возможных конструкций ВД «Многофазный гидростатический мотор» ПМ 160804 (см. рис. 16 и 17) .
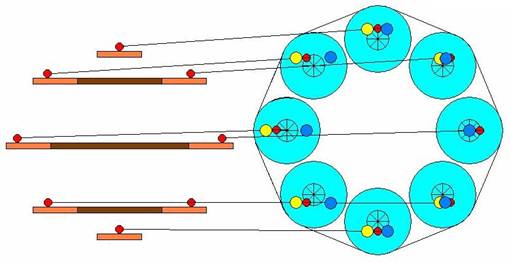
Рис. 16. Схема устройства ВД «Гидростатический мотор» ПМ 160804, вариант 2.
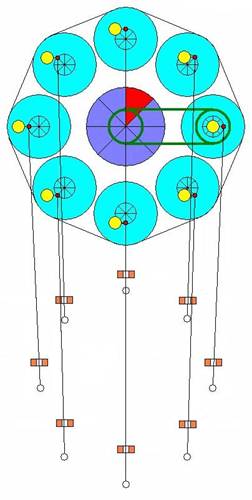
Рис. 17. Схема устройства ВД «Гидростатический мотор» ПМ 160804, вариант 3.
Глава 6. ВД «Торнадо». Семейство магнитных двигателей
ПМ 220106.
Внимание! Изготовление любого двигателя из семейства «Торнадо», по крайней мере, в ближайшее время, вряд ли возможно в условиях домашней мастерской. В будущем, когда промышленность освоит выпуск магнитов необходимой номенклатуры (сложная геометрия), эта оговорка станет ненужной.
Магнитные двигатели «Торнадо» ПМ 220106 явились результатом решения главной проблемы возникающей при конструировании магнитных двигателей – проблемы устранения т.н. «коллапса». Т.е. проблемы беззатратного исключения или уменьшения сил противодействующего притягивания (отталкивания) магнитов в ключевых фазах работы двигателя.
Методов решения этой проблемы достаточно много. Но все они малоэффективны, или сомнительны, т.к. магнитное поле изучено на данный момент очень и очень слабо.
Попутно решалась задача исключения из конструкций любых перемещающихся возвратно-поступательно, деталей или узлов двигателя, как объектов ограничивающих абсолютно все характеристики разрабатываемых двигателей.
Конечной целью первоначального анализа и теоретических изысканий, была конкретизация условий, при которых становится возможным конструирование магнитных двигателей, в которых взаимодействие магнитов целиком и полностью происходит по круговым замкнутым траекториям.
Исходной посылкой для рассуждений послужил тот факт, что магнитный феномен базируется на двух почти взаимно исключающих обстоятельствах:
1. Физически и конструктивно любой магнит всегда имеет два полюса – северный «N»
и южный «S», а так же нейтральную(ые) область(и).
2. Технологически в магнитное поле встречного магнита можно внести только один полюс – северный или южный. Второй полюс при этом будет оставаться вне зоны взаимодействия, или в нейтральной области.
Эти обстоятельства вызывали закономерно напрашивающийся вывод: Раз в применении к магнитам есть понятия «чет»-«нечет» («плюс-минус» - «север-юг»), значит должна существовать ситуация когда можно одно скомпенсировать другим в нужный момент, или одно усилить другим, так же в нужный момент (алгебраическое сложение). При этом все замкнуть с конца на начало, т.е. организовать замкнутый цикл.
Первый, основополагающий вывод, полученный в результате анализа предлагаемых в Интернете конструкций: Магнитный двигатель должен быть как минимум двухконтурным. Конструкция первого (силового) контура должна обеспечивать возникновение мощного крутящего момента для дальнейшего его использования в нагрузке. Второй контур должен быть вспомогательным (компенсационным). Его конструкция должна быть целиком ориентирована на исключение паразитных, вызывающих «коллапс», сил, возникающих в силовом контуре.
Второй – немаловажный вывод – магнитные системы силового и компенсационного контуров (по крайней мере, на первых порах конструирования), не должны иметь общих зон взаимодействия магнитных полей, т.е. должны быть разнесены в пространстве или изолированы. Это даст возможность обеспечения более предсказуемых взаимодействий между магнитами.
Третий, вытекающий из второго, вывод – внутренние силовые взаимодействия между силовым и компенсационным контурами необходимо обеспечивать чисто механической связью, т.е., например, посадкой роторов силового и компенсационного контуров, с необходимым сдвигом фаз, на единую ось.
Следующим этапом конструирования закономерно стал синтез пространственных изолированных магнитных систем, механически взаимодействующих между собой, способных при этом генерировать дополнительный вращающий механический момент для использования в нагрузке.
На этом этапе выявилось несколько важных моментов:
1. Магнитные системы обоих контуров должны состоять из множества отдельных, специфичной формы, магнитов. Соответственно сделать магнитный двигатель на основе выпускающихся промышленностью магнитов, затруднительно, т.к. номенклатура их чрезвычайно бедна.
2. Отдельные магниты должны иметь удлиненную форму в направлении полюсов, или в некоторых случаях, в направлении линии раздела полюсов.
3. То, что магнитное поле ослабевает, по крайней мере, пропорционально второй степени от расстояния в одних случаях является положительным свойством, в других – отрицательным.
4. Магнитные системы, состоящие из множества малых одинаковых магнитов, имеют ряд свойств, которые в обычных магнитах завуалированы настолько, что об их существовании мало кто подозревает. Например, оказывается, уже реализованы т.н. «магнитные экраны» (не те о которых мы знаем из школьного курса физики, основаные на вытеснении магнитного поля из металла – т.е. на изгибании магнитных силовых линий) - армированные плоскости, набранные из миниатюрных магнитов, которые действительно экранируют (ослабляют) магнитное поле, не вызывая (или почти не вызывая) силового взаимодействия с экранируемым полем. Это очень большой шаг вперед в познании магнитных взаимодействий. Вообще эта тема необъятна. Так, например, у меня есть основания предполагать, что исследования в этом направлении могут привести к созданию очень мощных линейных магнитных двигателей, не требующих для своей работы никакой энергии.
Итак, «Торнадо»…
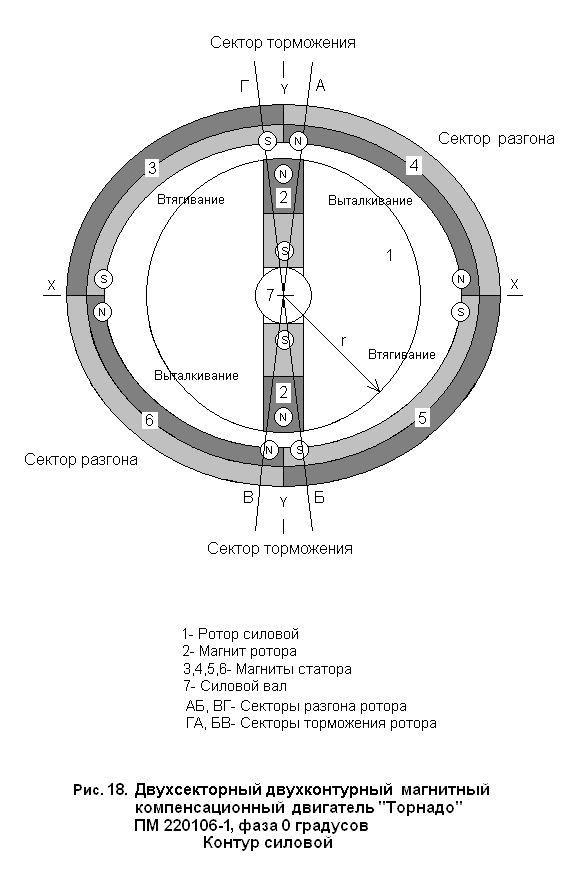
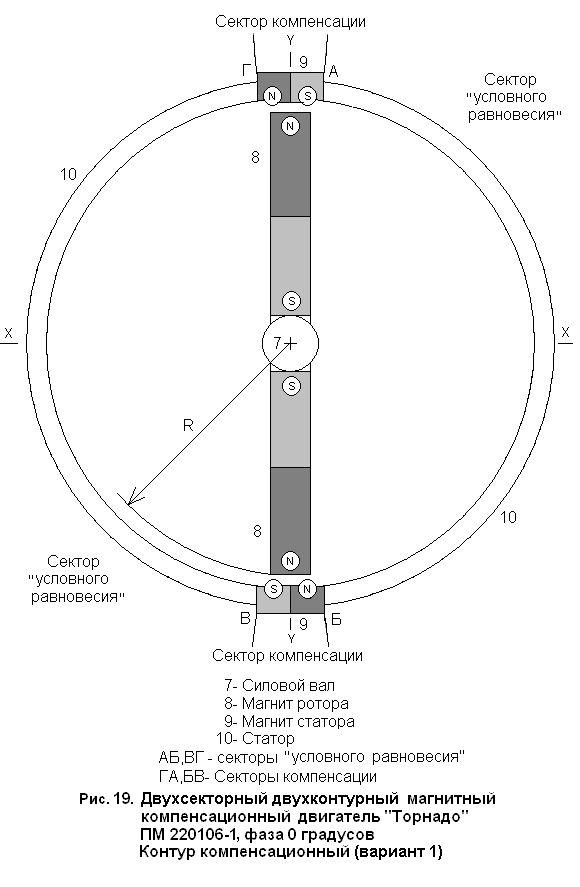
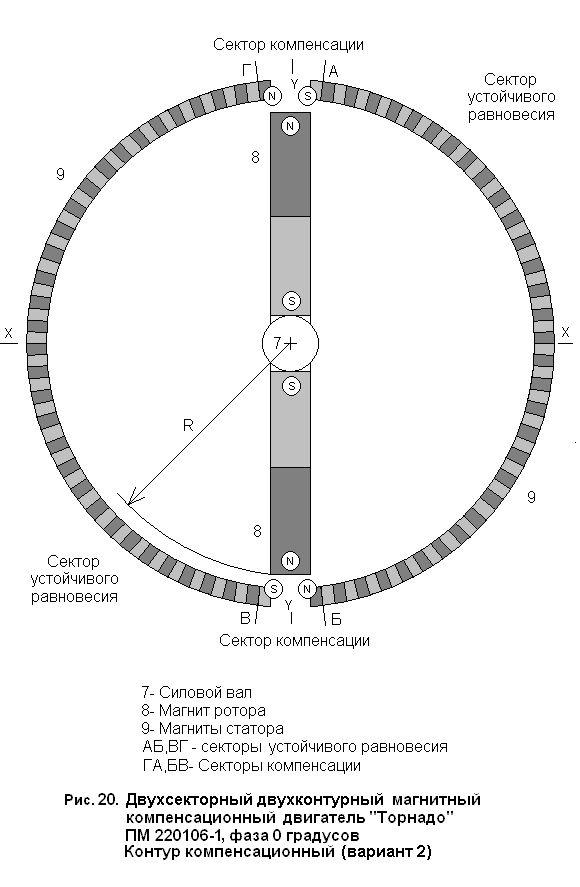
Рассмотрение принципа действия системы магнитной конфигурации «Торнадо» и двигателей на ее основе начнем с наиболее показательной модели – «Двухсекторный двухконтурный магнитный компенсационный двигатель ПМ 220106-1» показанной на рис. 18, 19, 20, 21, 22 и 23.
Для быстрого и легкого понимания рассмотрим сначала работу силового и компенсационного контуров в раздельности.
На рис. 18 изображен силовой контур. Он состоит из неподвижного статора набранного из эллипсных магнитных секторов с радиальной намагниченностью 3, 4, 5 и 6. Секторы 4 и 6 имеют северный полюс внутри, секторы 3 и 5 – снаружи.
Внутри статора находится немагнитный ротор 1 радиусом « r » с закрепленными на нем двумя полосовыми магнитами 2, обращенными северными полюсами к статору.
Исходное положение (фаза 0 градусов).
Начнем динамометром измерять силу, с которой нам необходимо удерживать или тянуть ротор при вращении его по часовой стрелке.
В фазе 0 градусов ротор находится в неустойчивом равновесии. Малейшее воздействие вызовет появление очень мощной силы (условимся, что это первоначальное микровоздействие направлено по часовой стрелке), которая стремительно вытолкнет оба магнита ротора (повернет ротор) в зону фазы 90 градусов. Здесь полюса магнитов статора изменяются, соответственно магниты ротора начнут втягиваться, т.е. ротор получит дополнительный вращающий момент. Где-то в последней трети-четверти полоборота магниты ротора начнут ощущать на себе отталкивающее действие магнитов статора находящихся далее по движению в другой половине его. Теперь нам необходимо приложить свою (внешнюю) силу для того, что бы привести ротор в аналогичное первоначальному, положение. Т.е. на этом участке траектории движения ротора магнитные взаимодействия будут противодействовать вращению (тормозить) и если внешняя сила окажется меньше силы противодействия, ротор войдет в состояние «коллапса», т.е. остановится. Но поскольку наша (внешняя) сила больше, мы доводим ротор в положение аналогичное первоначальному (фаза 0 градусов). Далее вся вышеописанная картина повторяется. Графически все эти перипетии показаны на рис. 23 график «А».
Компенсационный контур – вариант 1, изображенный на рис. 19 состоит из неподвижного немагнитного статора 10 на котором закреплены компенсационные магниты 9. Ротор состоит из двух полосовых магнитов 8 (немагнитное тело ротора не показано условно). Внешние торцы магнитов от оси удалены на расстояние « R ». Если теперь мы с помощью динамометра начнем делать измерения аналогичные вышеизложенным, то получим следующие результаты: В фазе 0 градусов ротор находится в положении неустойчивого равновесия. Как только мы его отпустим, он тут же стремительно выйдет в положение максимального взаимодействия притягивающихся разноименных полюсов магнитов, т.е. попадет в положение «коллапса». Далее ротор можно будет повернуть лишь воздействуя внешней силой. На этом этапе удерживающие силы будут противодействовать внешней силе. Далее по мере поворота ротора эта сила резко уменьшится и далее до фазы 90 градусов будет уменьшаться по квадратичному закону. После этого начнет так же по параболе увеличиваться и, в конце концов, при приближении к положению аналогичному первоначальному эта сила увеличится до максимального своего значения. После этого картина повторится. Графически поведение силы противодействия показано на рис. 23, график «Б». Как видно – поведение кривой далеко от идеала.
Лучше картина при использовании «виртуальных магнитов» статора (см. рис. 20. Контур компенсационный – вариант 2). Но и эта конструктивная схема имеет недостаток – обширные сектора устойчивого равновесия. В этих секторах магниты статора оказывают определенное импульсное противодействие вращению ротора. Положительно то, что эти импульсы попарно разнонаправлены и суммарное их противодействие, при условии, что внешний вращающий момент много больше, может быть на практике сведено к нулю (!).
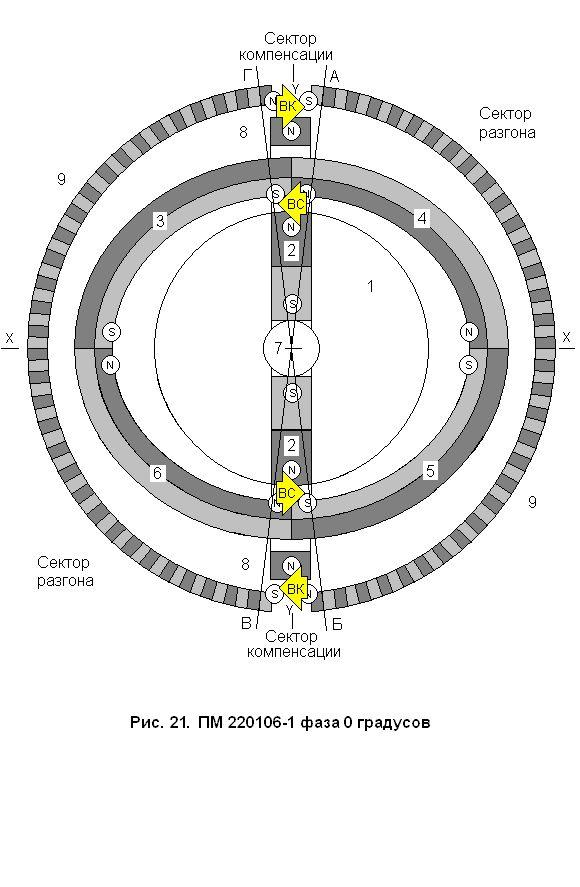
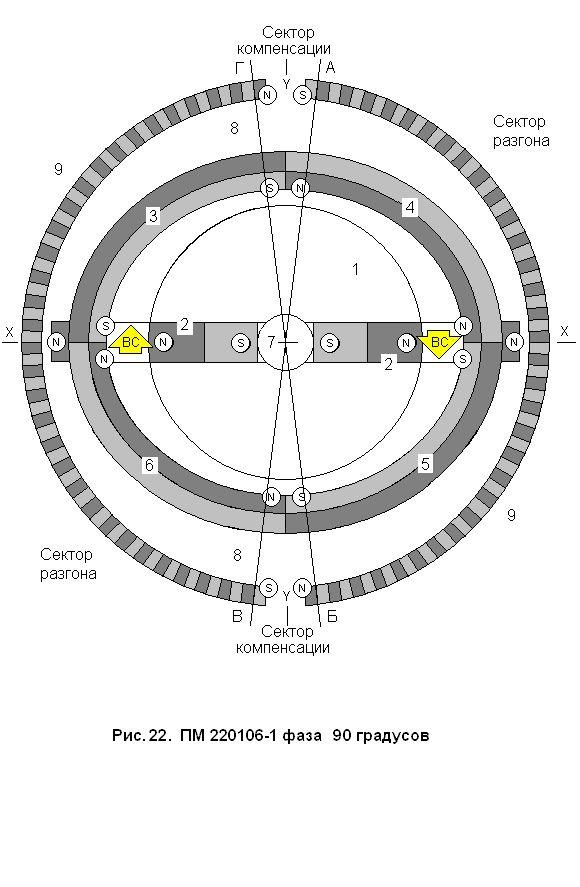
Совместную согласованную работу силового и компенсационного контуров (ПМ 220106 «в сборе») рассмотрим по рис. 21 и 22.
Сразу сделаем оговорку – роторы силового и компенсационного контуров вместе достаточно массивны и имеют инерционность маховика, или на силовой вал двигателя дополнительно насажен массивный маховик. Он необходим для преодоления нескомпенсированных сил противодействия и придания плавности вращению ротора.
В исходном положении (фаза 0 градусов) ротор двигателя находится в неустойчивом равновесии: магниты ротора силового контура испытывают на себе притягивающее действие магнитов статора, находящихся в направлении против часовой стрелки и отталкивающее действие магнитов статора, находящихся в направлении по часовой стрелке. Общий вектор силы ВС направлен против часовой стрелки.
В противоположность ему магниты ротора компенсационного контура испытывают притягивающее действие магнитов своего статора расположенных в направлении по часовой стрелке и отталкивающее действие магнитов расположенных в направлении против часовой стрелки. Общий вектор компенсационной силы ВК направлен по часовой стрелке. Численно векторы ВС и ВК равны. При этом они разнонаправлены. Т.е. компенсируют усилия друг друга, и соответственно ротор двигателя (он же – система ротор силового контура + ротор компенсационного контура) находится в безразличном равновесии. Это равновесие соблюдается в пределах сектора компенсации. Но если теперь внешней (очень малой!) силой довернуть его по часовой стрелке в начало сектора разгона, он, будучи подхвачен магнитным полем статора силового контура (в этом секторе ротор компенсационного контура взаимодействует со своим статором очень слабо, т.е. практически не противодействует). По мере дальнейшего поворота ротора силового контура, он запасает энергию вращения сначала за счет выталкивающего действия взаимодействующих однополюсных магнитов, затем, после преодоления положения «фаза 90 градусов», за счет втягивающего действия разнополюсных магнитов. Накопив, таким образом, достаточную механическую энергию в маховике, ротор по инерции проскакивает сектор компенсации. Далее картина повторяется каждые 180 градусов.
Особое замечание: Величины радиусов « r » и « R » позволяют добиться идеального баланса сил между силовым и компенсационным контурами. Они могут отличаться друг от друга существенно (в разы). Это позволяет использовать в компенсационном контуре вместо «редкоземельников» относительно недорогие широкораспространенные магниты.
На рис. 23 приведены циклограммы. Комментировать их не имеет смысла, т.к. они иллюстрируют вышеизложенное.
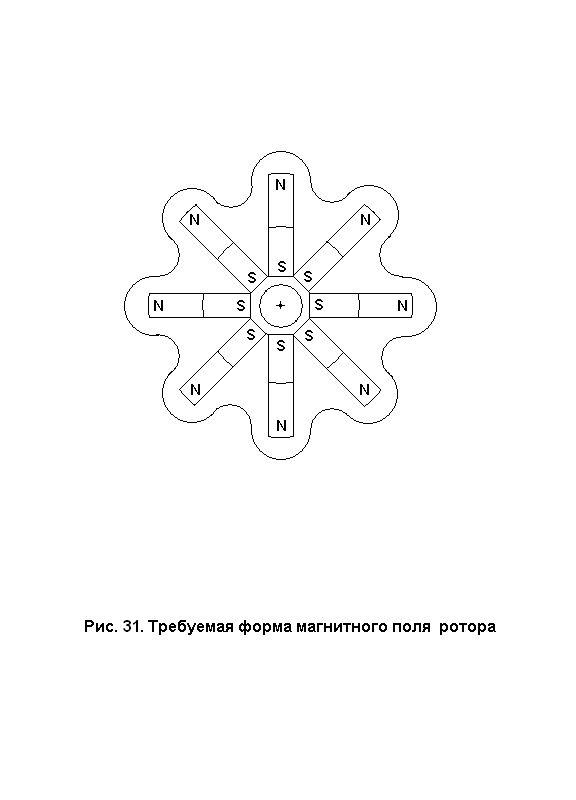
На рис. 31. в очень упрощенном виде приведен предпочтительный вид магнитного поля ротора. Поле должно иметь выраженную зубчатую форму. Только при этом эффективность преобразования силового взаимодействия ротора со статором в тангенциальную составляющую, действующую на ротор, будет максимальна. Это требование накладывает ограничения на количество магнитов установленных на роторе(ах).
Система «Торнадо» позволяет конструировать самые различные, практичные магнитные двигатели пригодные во всех сферах жизни. Перспективы здесь необозримы. Хочется верить, что внедрение их в жизнь будет происходить аккуратно и осторожно. Иначе перспектив у цивилизации останется еще меньше… на порядки!
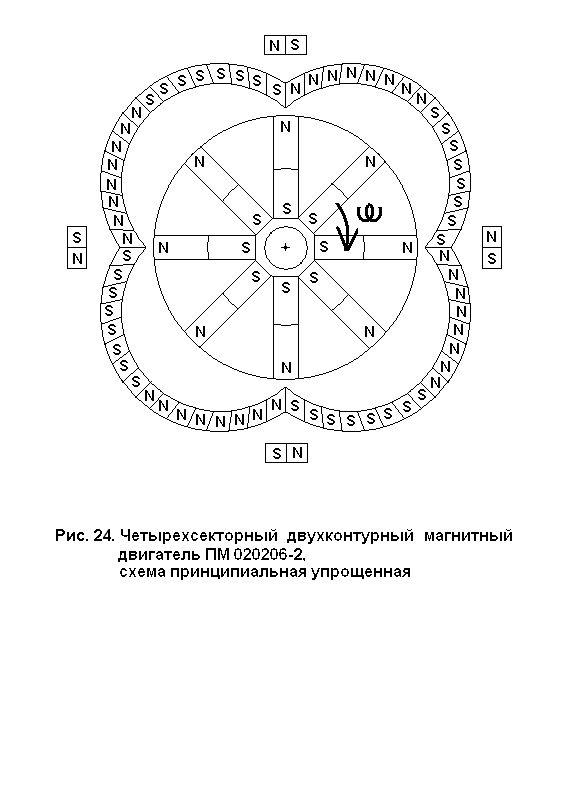
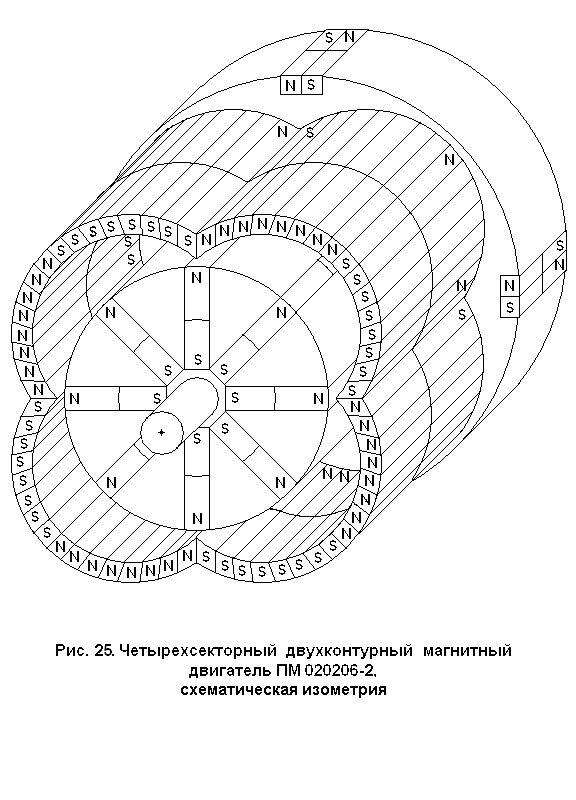
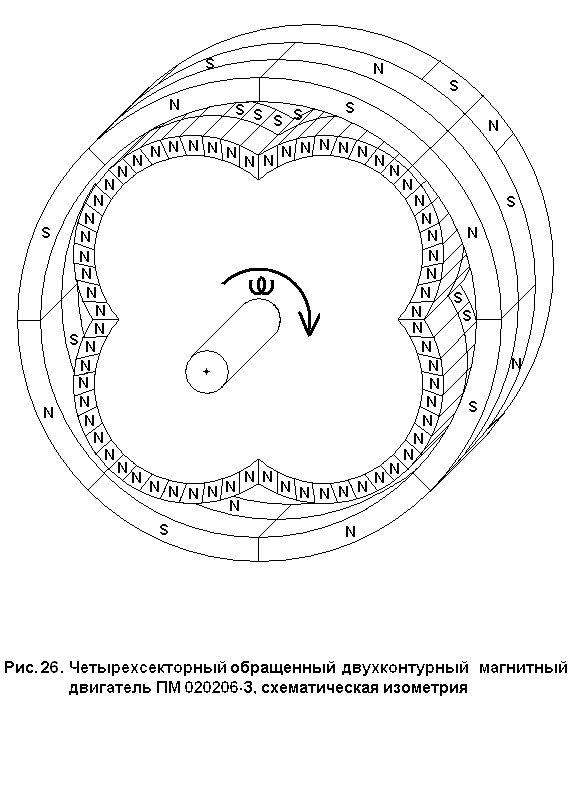
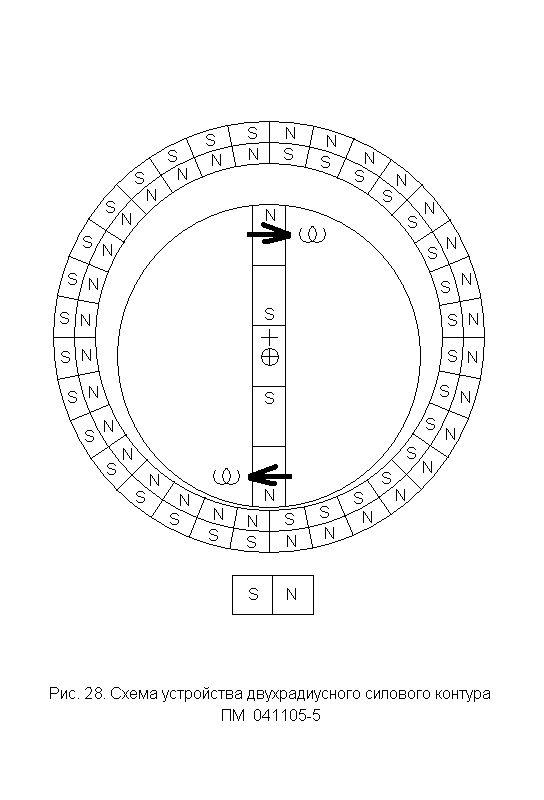
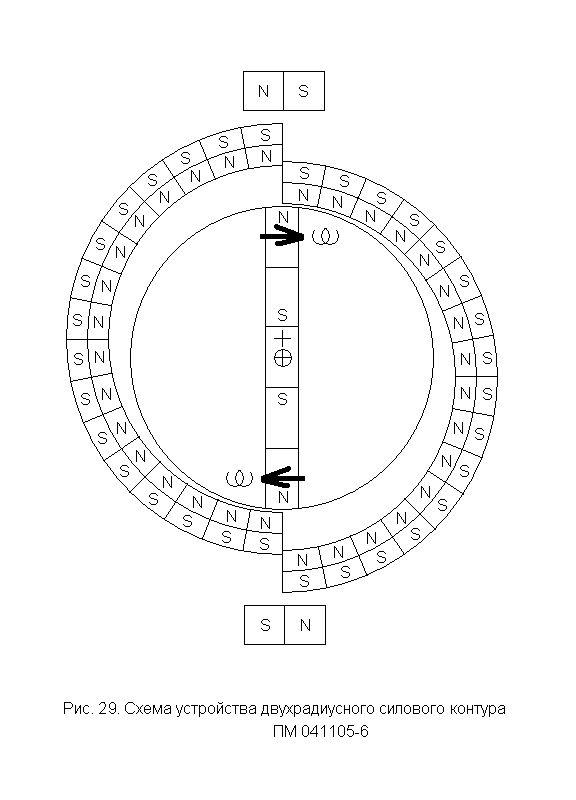
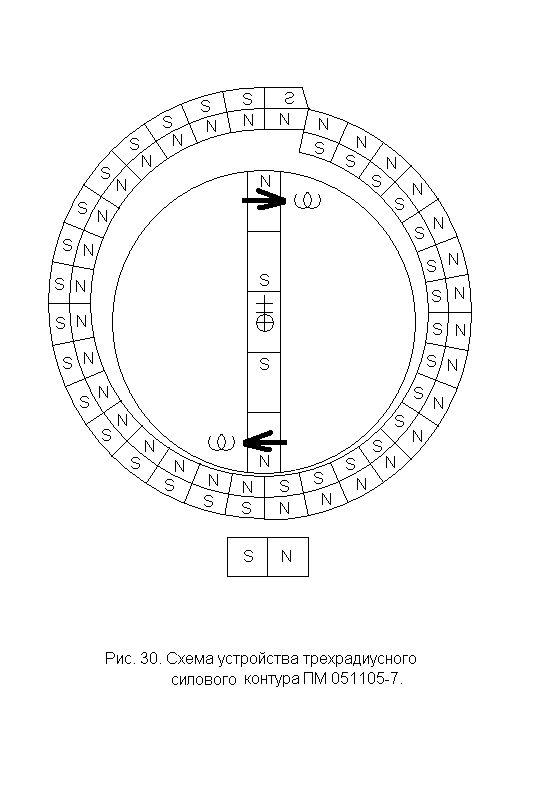
Ниже на рисунках 24, 25, 26, 27, 28, 29, 30 приведены схемы и изометрия возможных различных конструкций двигателей «Торнадо». Все двигатели двухконтурные. Местоположение магнитов компенсационных контуров показано схематично. У каждого из двигателей свои достоинства и недостатки. Думаю, что человеку, прочитавшему всю книгу, нетрудно будет разобраться. Так что комментарии опускаю.
Рис. 32 (фото) взят из интернетовского сайта «Welcome to Labyrinthina», в котором изложена интригующая история построения кораллового замка таинственным латвийцем Эдвардом Лидскальнином. Более 60 лет назад он сделал магнитный ВД, и по видимому, использовал его при строительстве. Сохранился только ротор ВД. Как был устроен статор и вспомогательные узлы – загадка.
На рис. 27 я предлагаю один из возможных вариантов их устройства.
PS. Следует иметь в виду, что сделать очень хорошую компенсацию в магнитных ВД затруднительно, но реально.
Можно менять рекомендуемый нулевой фазовый сдвиг между силовым и компенсационным контурами вплоть до десятков градусов.
Можно устанавливать магниты компенсационных контуров под углом к касательной ротора.
В компенсационных контурах можно устанавливать блоки из нескольких магнитов разной силы.
Для магнитной развязки контуров можно применять магнитные экраны.
Для придания необходимых свойств и конфигурации магнитных полей в соответствующих местах, можно применять магнитопроводы (в них поле затухает линейно от расстояния).
Для умощнения ВД можно компоновать силовые и компенсационные контуры пакетами параллельных магнитных систем.


Глава 7. Заключение.
Уважаемый читатель!
На момент опубликования ни одна из описанных в данной книге конструкций ВД не была воплощена «в металле» никем.
Перед собой такой задачи я не ставил никогда.
Считаю, что каждый должен приносить пользу там, где он умеет это делать лучше…
Буду очень рад, если кто-то изготовит ВД по моим идеям. А если поставит их выпуск на коммерческий поток, буду рад вдвойне.
Все идеи изложенные в этой книге считаю своей частной личной собственностью.
Все описанные здесь конструкции я дарю любому желающему частному лицу безвозмездно, сроком на 5 лет (начиная с 14 февраля 2006 г.), без права присвоения ВД имени этого частного лица или любого другого, без права претензий с его стороны на патентование, без права использования в преступных и военных целях, без права использования в интересах политических спецслужб любых государств, без права использования в антиэкологических, антинародных и антигуманных акциях, без права производства во всех государственных структурах и предприятиях всех стран, без права претензий на государственное либо учрежденческое патентование, без права на засекречивание.
Текст книги может быть использован любым издателем, для тиражирования в коммерческих целях, с обязательным указанием моего авторства, без права внесения каких-либо изменений и только в полном объеме.
Призываю правительства всех стран и международные правоохранительные органы жестко отслеживать случаи нарушений вышеприведенных положений в любых странах и предъявлять соответствующие иски к нарушителям с конфискацией имущества и выплатой штрафных санкций. Доля причитающихся мне (моим правопреемникам - родственникам) выплат со стороны нарушителей – 50 процентов от изъятого имущества в денежном выражении и суммы штрафов органу или уполномоченному лицу, предъявившему иск.
Призываю международные органы незамедлительно разработать систему однозначно толкуемых законов (как для государств, так и для частных лиц), юридически регулирующих все стороны внедрения ВД в повседневную жизнь, с направленностью на гуманизацию цивилизации и создание равных комфортных жизненных условий для каждого жителя планеты.
Соблюдение всех этих пунктов – гарантия невозможности гонки вооружений, исключения экономической кабалы из практики международных отношений и появления антигуманных режимов, на новом - энергетически бездефицитном витке развития человечества.
Текст и иллюстрации скомпонованы в единый блок в феврале 2006 г.
Вернуться к оглавлению
книги 1.