Вернуться к оглавлению книги 2.
Глава 2. Гидростатический модулятор.
Раздел 1. От автора: Постановка задачи.
Идея построения ВД на основе гидростатических модуляторов возникла во время проработки «Колеса Дьявола».
Суть ее заключается в следующем:
Если в осесимметричной емкости с жидкостью будет присутствовать эксцентрично-циклично перемещающаяся, и сохраняющая при этом свою пространственную ориентацию относительно горизонта, неоднородность с другой плотностью, то емкость, при принудительном ее вращении будет испытывать полцикла сопутствующий, и полцикла тормозящий, крутящие моменты.
Причем, сопутствующий, при определенной конфигурации внешних элементов можно сделать, по абсолютной величине и по ширине сектора, намного большим, чем тормозящий.
Такую емкость я назвал гидростатическим модулятором (ГСМ).
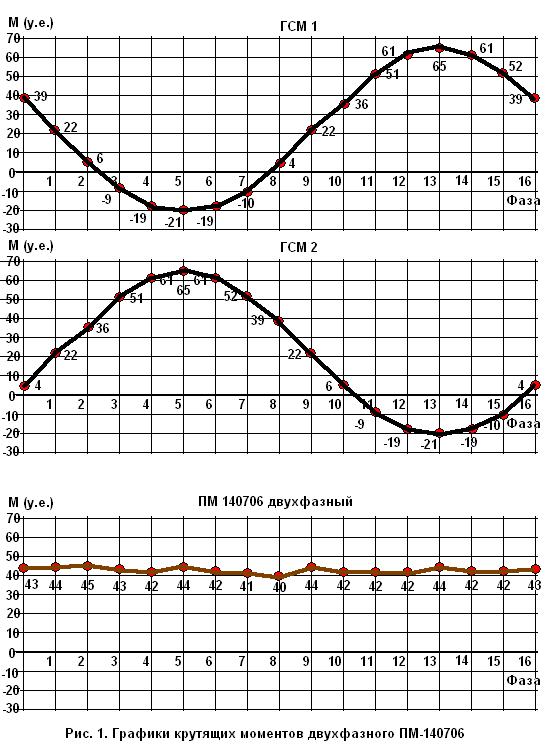
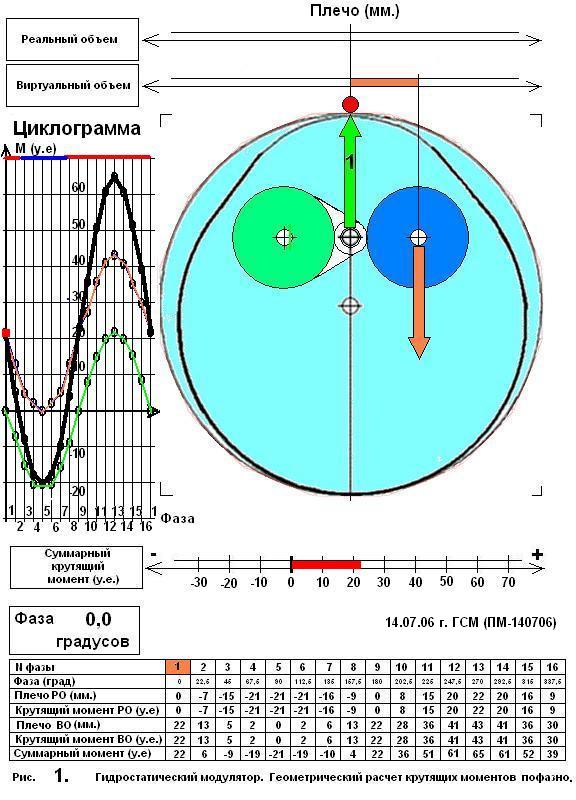
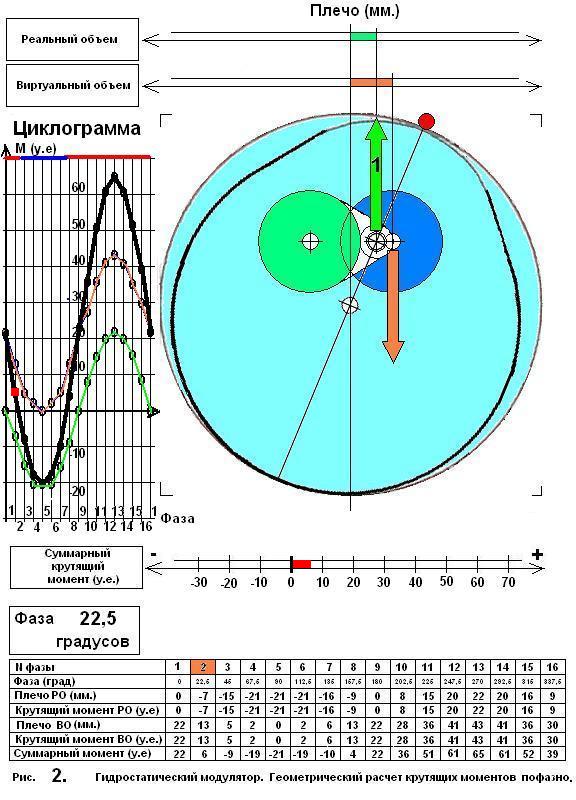
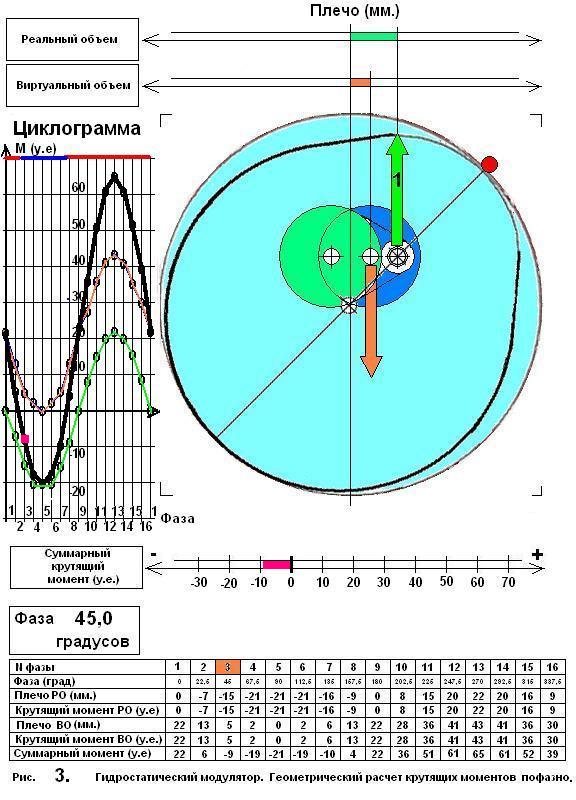
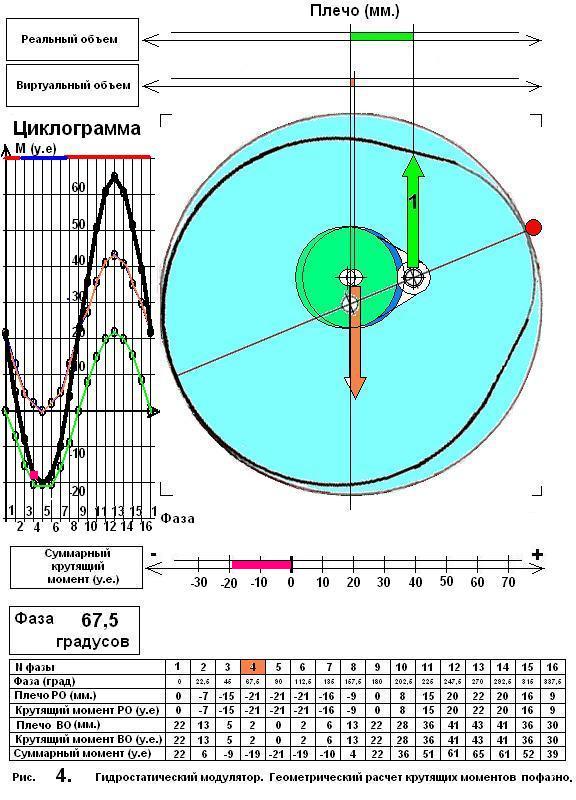
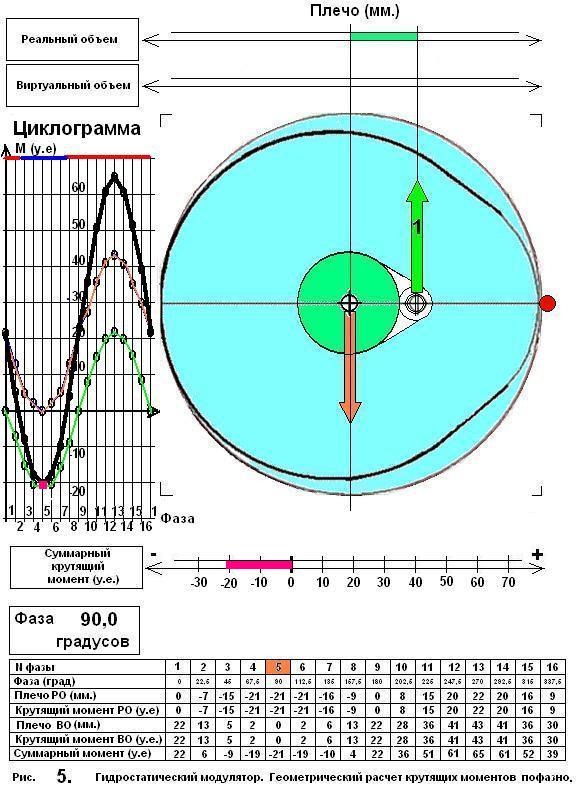
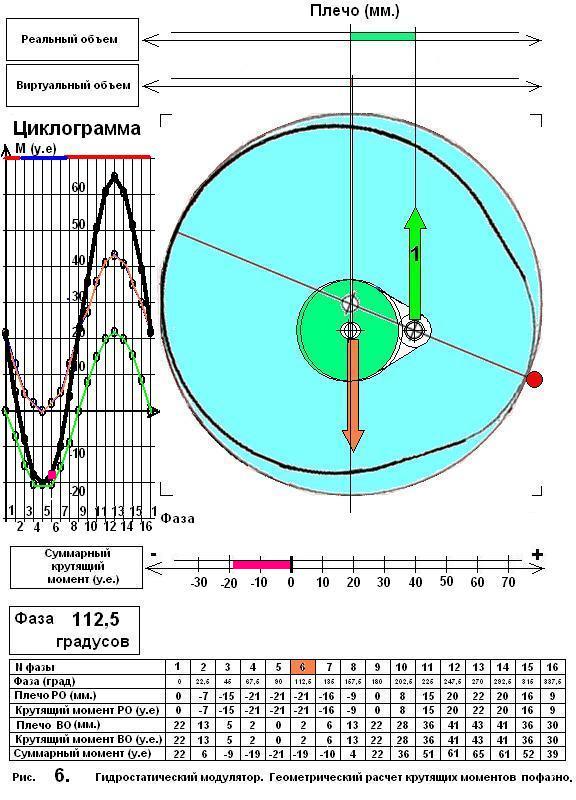
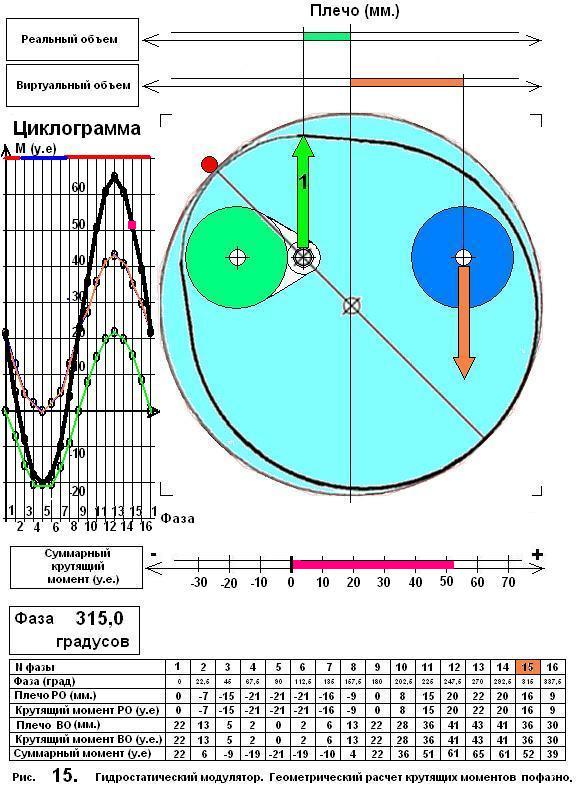
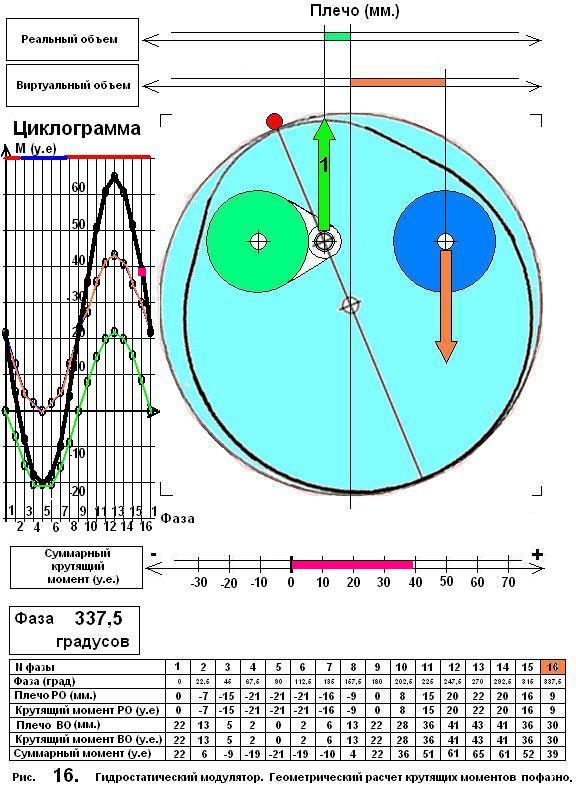
Теоретическая схема одного из вариантов ГСМ показана на Рис. 1.

Графический анализ раскладки фаз и расчеты показали, что теоретически это действительно так.
Но.
Разберемся с, пока принципиально невыясненным, моментом: Какова реальная ширина сектора сопутствующего крутящего момента и ширина сектора тормозящего момента?
Логика подсказывает, что оба сектора одинаковы, по 180 градусов.
Это вытекает из соображения, что полая емкость 3 (см. Рис. 1), находясь в положении, показанном на рисунке, находится в своей верхней «мертвой точке», т.е. дальнейший поворот модулятора (по часовой стрелке) вызовет ее подтапливание (а соответственно возникновение противодействующих сил Архимеда), что означает необходимость тратить на это энергию. С другой стороны – сама полая емкость 3 находится в левой части сечения ГСМ (т.е. слева от вертикали). Это означает, что левая половина ГСМ легче правой. Таким образом, в ГСМ с одной стороны присутствует реальное воздействие полой емкости 3 заставляющее его остановиться в верхней «мертвой точке», а с другой – присутствует виртуальная неуравновешенность обусловленная нахождением полой емкости 3 в левой части сечения.
Причем виртуальная неуравновешенность никак себя не проявляет, т.к. точка приложения ее силы – это ось вращения ГСМ.
Можно ли проявить эту виртуальную неуравновешенность и каким образом – вопросы принципиальные.
Один из возможных вариантов решения:
Не изменяя высоты подвеса оси вращения ГСМ, периодически на короткое время смещать ее немного по горизонтали вправо (в точку «А»).
Что это нам дает?
Первое – создаются условия для проявления виртуальной неуравновешенности.
Это выразится в том, что точка действия силы Архимеда на полую емкость 3 окажется левее нового положения оси вращения ГСМ. Соответственно сила Архимеда (реальная) заставит ГСМ довернуться по часовой стрелке на определенный угол, до положения, когда точка действия силы (ось вращения полой емкости 3) окажется точно над новым положением оси. При этом основная ось вращения ГСМ приподнимется (сам ГСМ сместится чуть-чуть вправо), и что очень важно - это перемещение не требует энергетических затрат
Теперь, если сместить новую ось вниз и чуть-чуть влево, основная ось снова ляжет на свое место, и снова – это перемещение не требует энергетических затрат.
При этом ГСМ за счет действия Архимедовой силы, повернется обратно – т.е. вернется в верхнюю «мертвую точку».
На первый взгляд кажется, что ничего хорошего из такой комбинаторики не извлечь.
Но это не так. Налицо то, что мы практически без затрат энергии сумели заставить ГСМ активно повернуться на угол больше 180 градусов. Но только в импульсном режиме.
Если два (или больше) таких параметрических ГСМов связать в соответствующих фазах какой-либо подходящей трансмиссией, то они, взаимодействуя, будут создавать избыточный крутящий момент, который можно использовать для привода нагрузки.
Анимацию абстрактного ГСМ см. в приложении 1.
{kind=link}
Циклограммы работы двухфазного абстрактного ПМ на основе ГСМ см в приложении 2.
{kind=link}
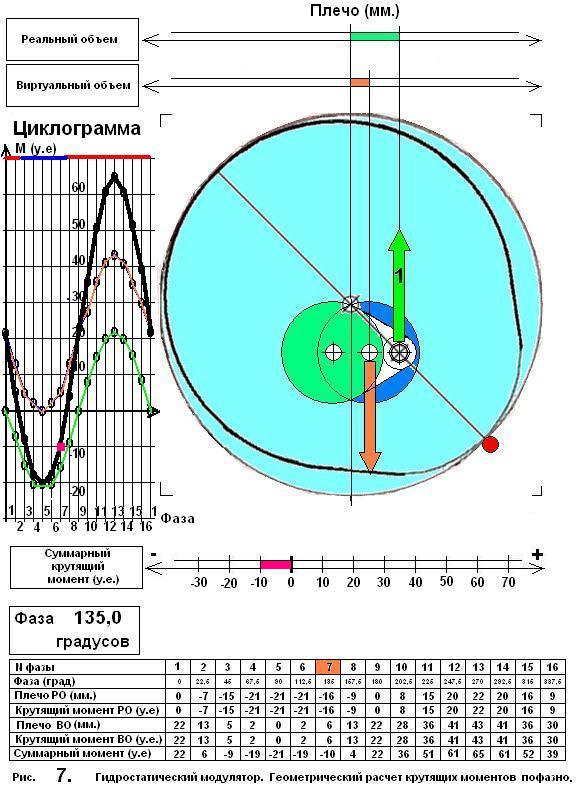
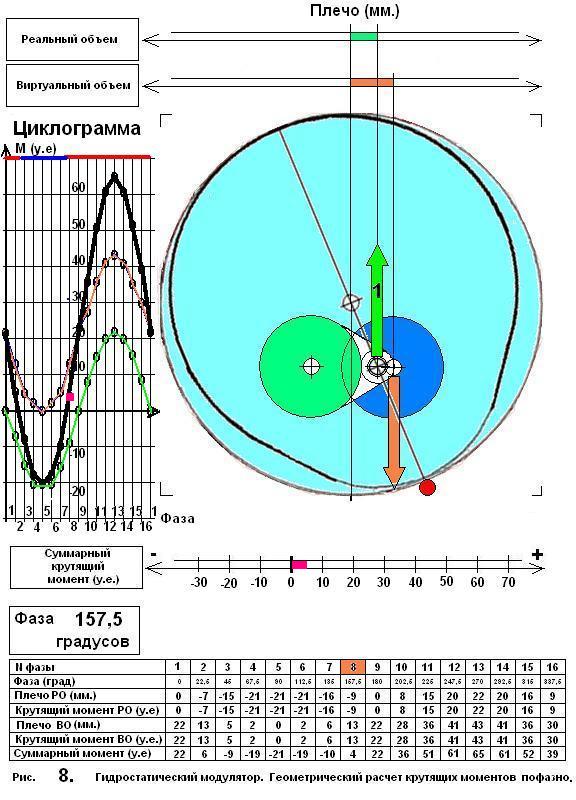
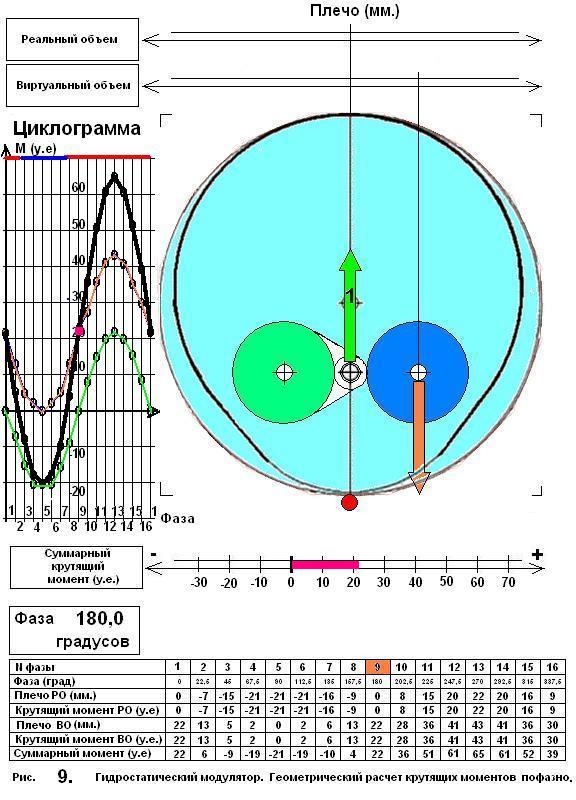
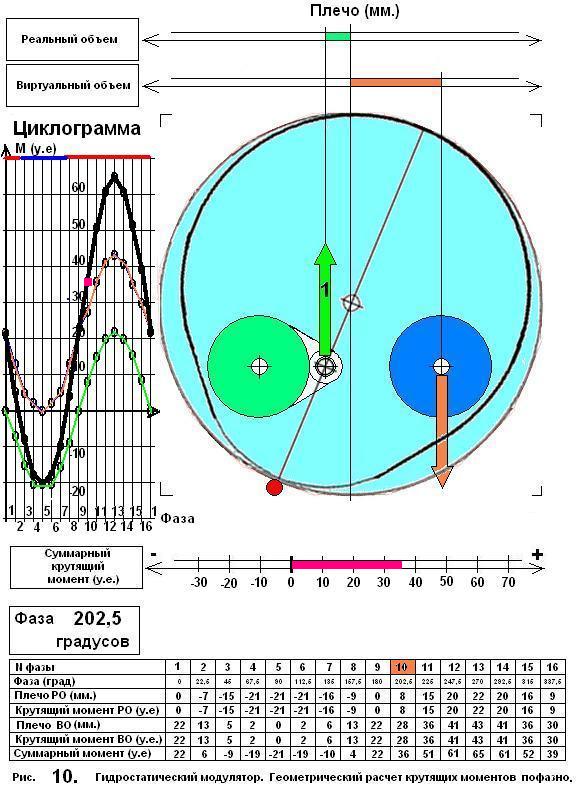
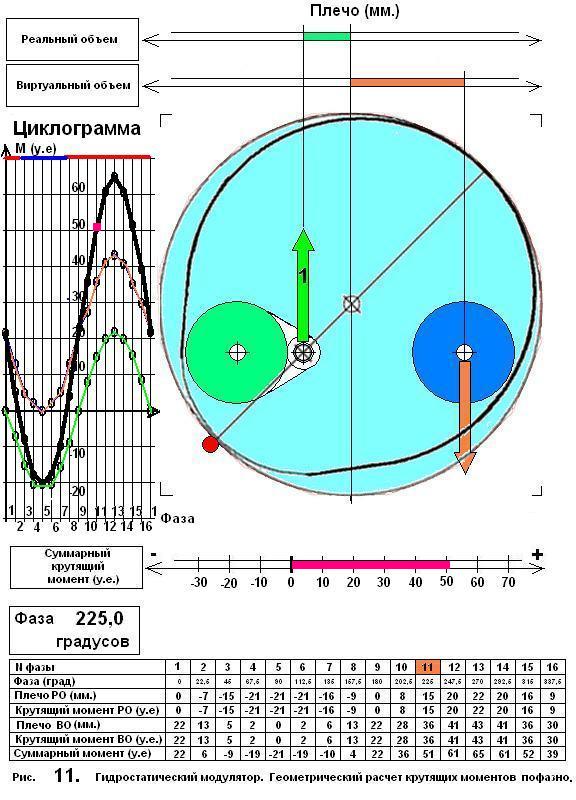
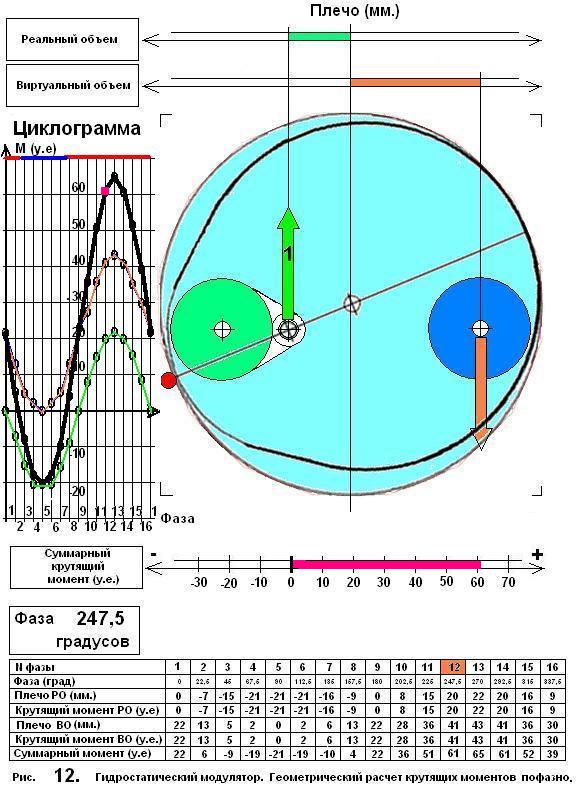
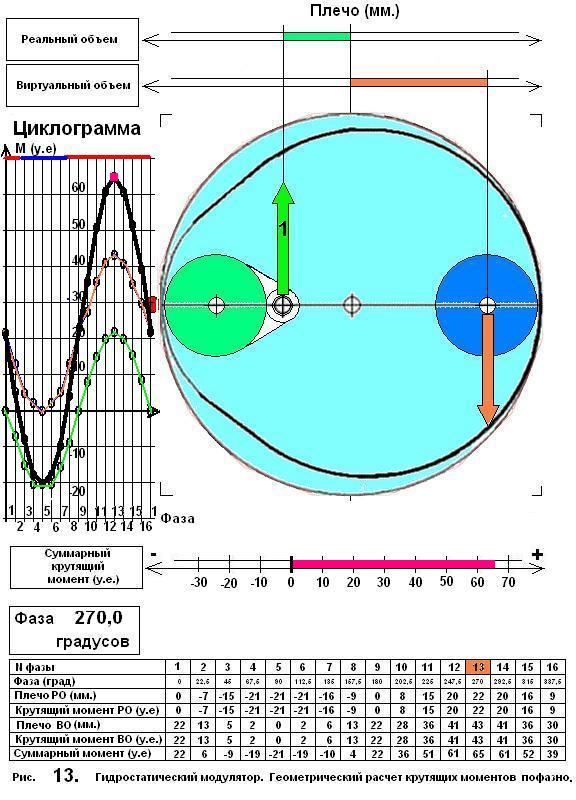
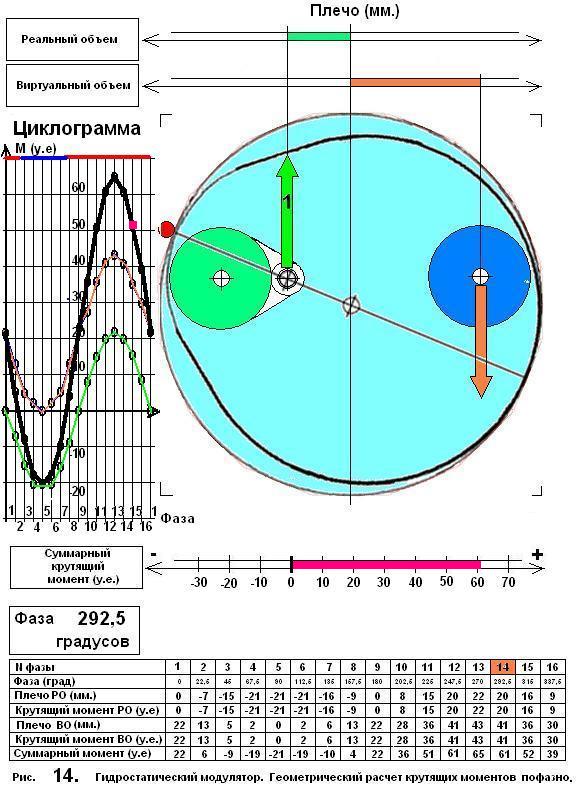
Раздел 2. Графический материал для теоретического анализа.
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Оптимизированная форма поплавка показана ниже:

Внимание: Весь предложенный материал – это только идея.
Вернуться к оглавлению книги 2.